
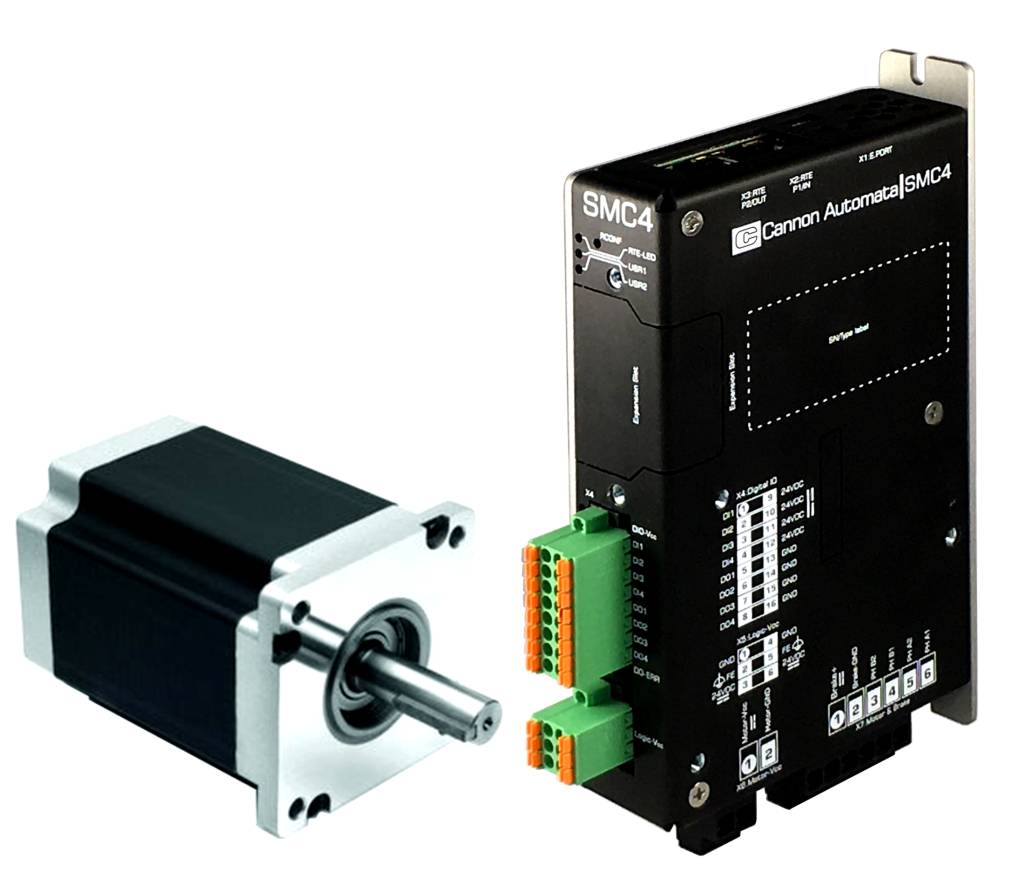
Der Schrittmotor SMC4 von Cannon-Automata mit RT-Ethernet Interface eignet sich besonders in Robotik-Anwendungen oder 3D-Druckern als Alternative zu teuren Servoantrieben. Alle für den Betrieb an CNC- oder Roboter-Steuerungen benötigten Funktionen sind vollständig implementiert. Dazu gehören u.a. zyklische Geschwindigkeits- oder Positionsvorgabe, Positionierfunktionen und verschiedene Homing-Modes. Der Einsatz in anspruchsvollen Motion-Anwendungen mit interpolierenden Achsen ist ebenfalls möglich. Die Onboard-I/Os erlauben die Realisierung einer kompletten Positionierachse mit Freigabe- und Statussignalen, Endschalter- und Referenzschalter-Eingängen sowie Eingängen für die sichere Abschaltung der Endstufe. Für Mehrachsanwendung kann die Schrittmotorsteuerung um eine zweite Endstufe mit identischen Leistungsdaten erweitert werden.