
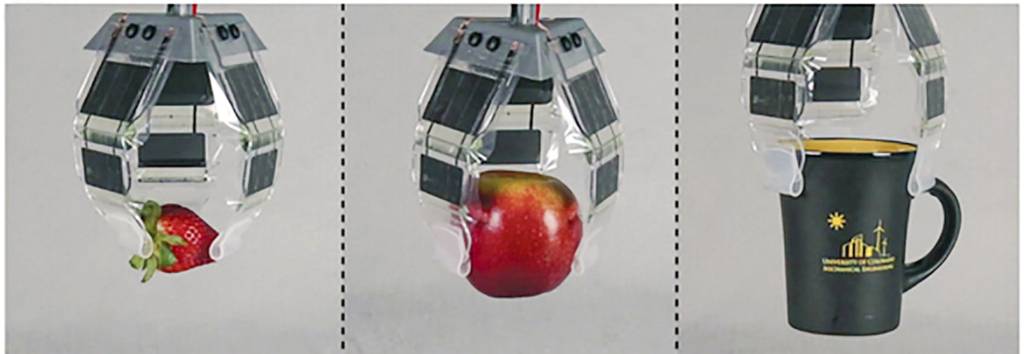
Um bionischen Gelenken Leben einzuhauchen, werden kleine mit Flüssigkeit gefüllte Kunststoffbeutel elektrostatisch in Bewegung versetzt. Die Stärke und Form der angelegten elektrischen Spannungen bestimmen die Stärke, Art und Form der Bewegung, um beispielsweise den komplexen mechanischen Vorgang einer menschlichen Hand nachzuahmen. Mehrere Gelenke in beliebigen geometrischen Formen können hintereinander ähnlich einem Finger angeordnet werden. Schließlich ist es ein gewaltiger Unterschied, ein rohes Ei oder ein mehrere kg schweres Objekt zu bewegen.
Eindeutige Analysen
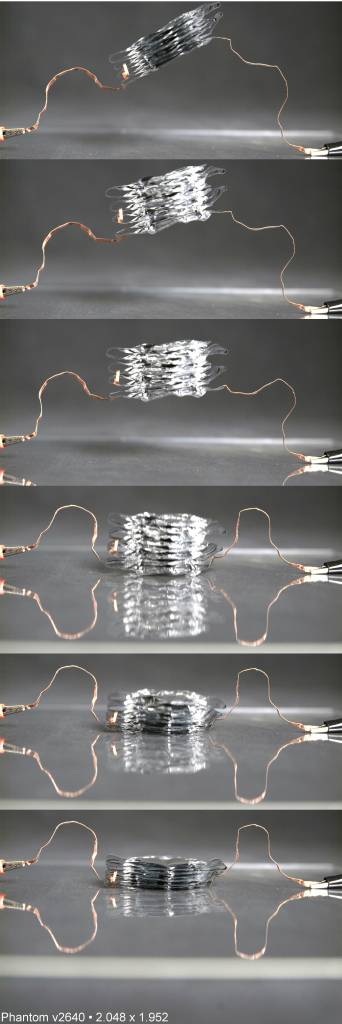
Die Regelung der angelegten variablen elektrischen Spannung am Aktuator/Gelenk kann in seiner ganzen Vielfalt von Rechtecks-, Dreiecks-, Sinus- und Linearspannung erfolgen. Die zeitlich abhängige Deformation der Beutel kann damit sehr präzise geregelt werden. Mit dieser Bionik erfolgt die Nachahmung der Bewegungen von Insektenbeinen wie Spinnen in Geschwindigkeit, Kraft und bidirektionalen Bewegungen. Von noch größerer Bedeutung ist die Nachbildung von menschlichen Extremitäten. Am MPI-IS in Stuttgart wird seit über einem Jahr am Verstehen dieser bionischen Vorgänge in seinen Grundlagen geforscht. Die Forschungsarbeiten sind inzwischen auch unter dem Titel der sogenannten Spider-inspired Electrohydraulic Soft-actuated joints (SES)-Gelenke bekannt geworden. Das Kameramodell Phantom v2640 von High Speed Vision liefert bei diesen Arbeiten die erforderlichen Ultra Highspeed-Bildsequenzen (U-HS) für die Bewegungsanalysen. Damit können quantitativ und qualitativ die Beschleunigung, Geschwindigkeit und das Bewegungsverhalten eines Gelenkarmes – extrem zeitgedehnt mit sehr hoher Bildauflösung – genau verfolgt werden. Mit der gleichzeitigen Verfolgung der geometrischen Verformung dieser Aktuatoren, einschließlich dem darin erfolgenden Fließen der Flüssigkeit (Strömungsverhalten), analysiert das auch viele andere Aspekte und Funktionsfaktoren. Die High-Speed-Videosequenzen ermöglichen eine detaillierte Bild zu Bild Analyse bei Dehnungsraten bis zu 7.000%/s. Arbeitsbereiche über 100.000 Bilder/Sekunde, welches einer Schrittweite von 0,01 Millisekunden entspricht. Diese werden zeitsynchron zu anderen Messdaten erfasst. Logische Vorgänge im Bereich von Millisekunden werden aufgezeichnet, um daraus Aussagen zu extrahieren. Orientierungsgröße ist beispielsweise ein Beutel von 1 cm Länge, der mit 0,1 Millisekunden bei Full-HD-Auflösung und 10.000 Bilder pro Sekunde aufgenommen wird. Das ermöglicht das Erfassen von Bewegungsdifferenzen im Bereich von 0,001mm.

High Speed bei Tageslicht
Aus den Versuchen ergeben sich ständig neue Anforderungen in der Grundlagenforschung der SES-Gelenke und die Verwendung von Lasern ermöglicht nur punktuelle Messungen. Hochgeschwindigkeitsaufnahmen ermöglichen die Verfolgung der gesamten Aktuator-Geometrie mit einer großen Bandbreite von Informationen. Gleichzeitig mit der Beutelverformung und Gelenkbewegung können beispielsweise auch winzige Luftblasen in der Flüssigkeit verfolgt werden um etwa Hinweise auf das Strömungsverhalten der Flüssigkeit im Beutel erhalten, entsprechend der jeweils angelegten Spannung. Für den Einsatz dieses Kameramodells sprach die hohe Bildauflösung bei gleichzeitig extrem hohen Bildraten. Diese Kamera ist die nach Herstellerangaben weltweit schnellste 4-Megapixel-Kamera mit einer maximalen Auflösung von 2048 x 1952 Pixel, bei einer Framerate von 6.600 Bilder/s und 12-Bit Bildauflösung. In reduzierter Auflösung bietet die Kamera 300.000 Bilder/s und eine minimale Belichtungszeit von 142 ns. Im Binned-Mode (2×2 Pixel) wird die Lichtempfindlichkeit von Mono 16.000 ISO bis auf 25.000 ISO gesteigert. Die Lichtempfindlichkeit ermöglicht Aufnahmen bei Tageslicht, was den ganzen Versuchsaufbau vereinfacht. Aufgrund der Lichtempfindlichkeit der Kamera lässt sich zudem die Blende der Objektive weitgehend schließen, um den Tiefenschärfebereich zu verbessern. Die interne Abtastrate beträgt 26Gpx/s und ein Ringspeicher lässt sich auf 288 GB aufrüsten. Über die 10-GB-Ethernet-Schnittstelle werden Daten übertragen. Alternativ steht der optionale CineMag-V-Speicher mit bis zu 8TB Volumen zur Auswahl.
Kleine Details, große Wirkung.
In den Versuchen geht es darum. die gesamte Dynamik in allen Aspekten präzise zu untersuchen. Die Kombination elektronischer Messtechnik und zeitlich exakt synchronisierten Bildern qualifiziert die Aussagen von den jeweils erfassten Ereignissen. Diese elektrohydraulischen Muskeln sind von großem Vorteil gegenüber dem Verhalten und der notwendigen Gestaltung von Elektromotorlösungen mit gleichen Aufgaben/Ergebnissen. Das ergibt für die SES-Gelenke eine hohe Sicherheit gegen Überlastung. Durch die Hintereinanderschaltung von mehreren Gelenken und mehreren Fingern, kann man den Zugriff äußerst sensibel und vielseitig gestalten. Das erste Gelenk kraftvoll, letztes Gelenk sehr sanft. Das bezieht sich nicht nur auf die jeweils ausgeübte Kraft, sondern auch auf die Beschleunigung der Gelenkteile. In einem zukünftigen Schritt mit einer weiteren Kamera will man sich auch den 3D Raum per Ultra HS-Video erschließen.
Die Grundlagen erforschen
Bionische elektrohydraulische Aktuatoren haben in der zukünftigen Soft-Robotik und anderen interagierenden Bereichen ein riesiges Potential in Gestaltung, Anwendung und Wirtschaftlichkeit. Die weich arbeitenden Gelenke sind einfach, leicht, flink, raumsparend, einfach und billig herstellbar, vielseitig gestaltbar von filigran bis robust, Synergie mehrteiliger Gelenke, minimaler mechanischer Aufwand, geringer Energieverbrauch, normale Kunststofffolien, hygienisch pflegeleicht, wasserfest, effizient feinfühlig oder auch starke Kraftübertragung, leicht skalierbare Produktion, und sie sind besonders simpel digital steuerbar. Die Stärken und der internationale Erfolg der MPI Fachrichtungen und Abteilungen liegen in der Grundlagenforschung. Dabei haben die Forschenden große Freiheiten, da sie ohne Sponsoren auskommt, die Einfluss nehmen. n im KW-PR Redaktionsbüro.