
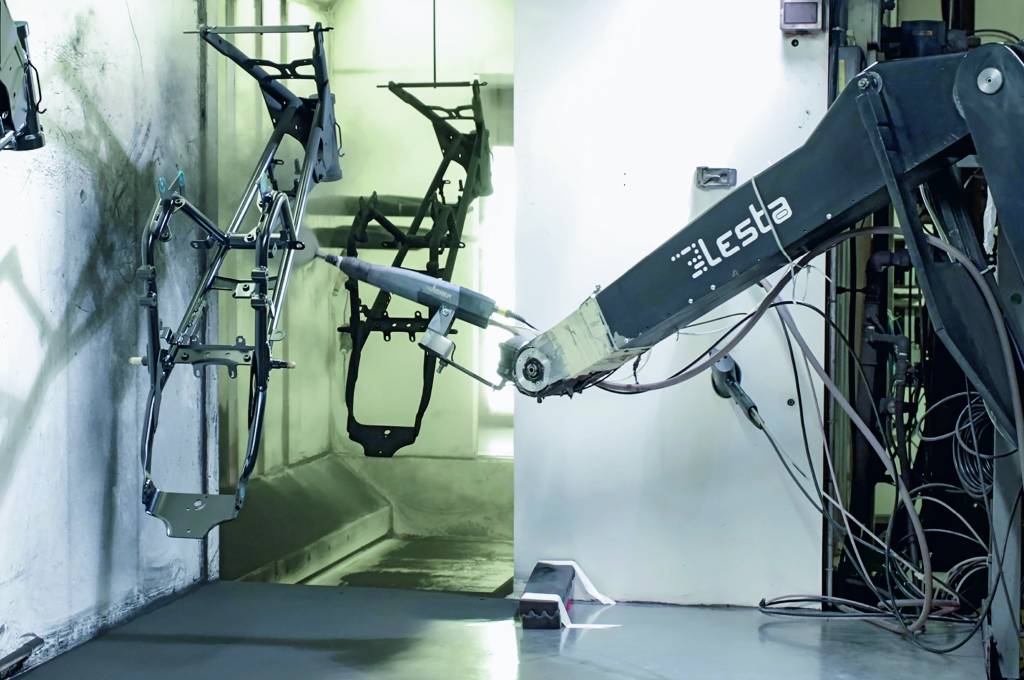
Lesta hat sich auf roboterbasierte Lackiersysteme spezialisiert. Aktuell sind rund 700 Roboter im Einsatz. „Jedes Jahr kommen etwa weitere 100 Anlagen dazu“, betont Fabio Ferrario, Leiter Automation bei Lesta. Das Spektrum reicht von Metall-, Holz-, Kunststoff-, Glas- und Keramikproduzenten bis zu Anwendungen in der Textil- und Lebensmittelindustrie. Entsprechend der unterschiedlichen Zielmärkte gibt es die Roboter in mehreren Varianten sowie mit Atex- und UL-Hazardous-Location-Zulassung.
Darüber hinaus hat Lesta auch selbstlernende, anthropomorphe Roboter entwickelt, z.B. Lebot MV A5 und MV A6. Diese Typen sind in der Lage, die zuvor von Hand angelernten Bewegungen aller Achsen in Echtzeit zu erfassen und danach im Automatikbetrieb präzise zu reproduzieren. Der Lackierer bewegt dazu den Roboterarm bei abgeschalteten Motoren – durch ein pneumatisches Ausgleichssystem fast ohne Kraftwand und nahezu schwerelos. Da die pneumatische Gewichtskompensation auch während des Betriebs aktiv bleibt, müssen die Motoren nur geringe Kräfte aufbringen. Das reduziert die benötigte Motorleistung, deren Baugröße und die zu den bewegenden Massen, was wiederum der Dynamik zugute kommt.
„Vor allem macht die außergewöhnliche Leistungsfähigkeit unserer Steuerungssysteme den Unterschied“, bekräftigt Ferrario. Für die Entwicklung der Automatisierungs- und Steuerungsanwendung nutzt der Anbieter Twincat 3. Dessen Flexibilität und Offenheit sowie das breite Produktspektrum von Beckhoff haben sich als Vorteile erwiesen. So konnte Lesta z.B. auf den Twincat-Bibliotheken aufsetzen und diese mit dem eigenen Knowhow, z.B. die spezifische Koordination der interpolierten Bewegungen der Roboterachsen, kombinieren. „Twincat 3 ermöglicht uns, ein effektives und hochleistungsfähiges System aufzubauen, das wir bei Bedarf jederzeit mit Komponenten von Drittanbietern oder um weitere Algorithmen erweitern können“, betont Ferrario.
Fließend wie ein Lackierer
Abhängig von der Applikation haben Lesta-Roboter zwischen fünf und über ein Dutzend interpolierende Achsen. Dazu Ferrario: „Die Herausforderung besteht darin, mit den Robotern die fließenden und geschmeidigen Bewegungen eines Lackierers perfekt nachzuahmen.“ Für eine gleichmäßige Oberflächenbeschichtung der Werkstücke ist allerdings mehr als eine genaue Positionierung erforderlich. Deshalb nutzt Lesta Twincat 3 PLC/NC PTP (TC1250) und Twincat NC Camming (TF5050), um die Bewegungen des Lackierers passenden nachzubilden. Auch das manuelle Teachen der anthromoporphen Roboter ist in Twincat integriert. Die Safety-Funktionen sind über Twinsafe realisiert. Lediglich bei der Visualisierung nutzt Lesta das .Net-Framework von Microsoft. Die HMI-Anwendung läuft parallel zur Steuerungs-Task auf demselben Rechner, einem Embedded-PC vom Typ CX5140 mit Intel-Atom-Quadcore-Prozessor. Die Kopplung von Visualisierung und Steuerungsapplikation erfolgt über das ADS-Protokoll. Als HMI-Hardware kommt ein Multitouch-Einbau-Control-Panel CP2915 zum Einsatz.
Für die Umsetzung der in Twincat generierten Bewegungsabläufe setzt Lesta auf das Multiachs-Servosystem AX8000, da es komplexe Motion-Profile mit hoher Dynamik und gleichzeitig sanft und präzise umsetzen kann. Weitere Vorteile sieht Fabio Ferrario in den kompakten Abmessungen sowie in der One Cable Technology (OCT) für den Anschluss der Servomotoren AM8032 und AM8043. Beides spart Platz im Schaltschrank und reduziert die Materialkosten sowie die Montagezeit. „Üblicherweise benötigen wir beim Kunden von der Aufstellung bis zur Inbetriebnahme einer Lackierstation nur eine Woche“, sagt Fabio Ferrario. „Freitags kann der Kunde dann bereits autonom arbeiten.“
Wettbewerbsvorteil Skalierbarkeit
Ob es sich bei einem Projekt um einen Sechsachsroboter oder eine Zwölfachs-Brückenkran-Variante, eine Pulverlackier- oder eine Nasslackieranlage handelt, spielt keine Rolle. Alle Varianten basieren auf einer Master-Konfiguration, deren Funktionen entsprechend der Robotervariante aktiviert werden. Für diese Flexibilität verantwortlich ist die offene und skalierbare Plattform von Beckhoff. Dazu Ferrario: „Ohne Zweifel ist die Skalierbarkeit unserer Systeme ein entscheidender USP, mit dem wir uns von unseren Mitbewerbern differenzieren.“ Oft werden die Lackieranlagen an das Kundennetzwerk angebunden, um Daten mit anderen Anlagenteilen oder Fabrikmanagementsystemen auszutauschen. Die Verfügbarkeit des Kommunikationsstandard OPC UA in Twincat sorge für die entsprechende Konnektivität.
Mit Blick auf künftige Entwicklungen ist maschinelles Lernen ein intensiv diskutiertes Thema. Von dieser Technologie verspricht sich Lesta weitere Steigerungen der Produktivität und der Qualität, etwa durch eine automatische Generierung von Lackierstrategien bzw. -routen. Auch hier setzt Ferrario auf die Automatisierungs- und Steuerungsplattform von Beckhoff. Schließlich sind maschinelles Lernen und Deep Learning bereits als Twincat Functions verfügbar.