
Um reproduzierbare und validierbare Tankreinigungsprozesse zu ermöglichen, kommen CiP-Systeme (Cleaning-In-Place) zum Einsatz. Allerdings ist die effiziente und automatisierte Reinigung von Behältern eine Herausforderung, da es bisher an Möglichkeiten der direkten Inline-Kontrolle des Reinigungserfolgs fehlt und ortsabhängige bzw. produktspezifische Reinigungsbedürfnisse nur unzureichend berücksichtigt werden können, wenn der Tank selbst eine Art Black Box darstellt. Die Reinigungssysteme werden daher sicherheitshalber am Worst-Case-Szenario ausgelegt und ‚überreinigen‘ so mit einem hohen Ressourceneinsatz (Wasser, Chemie, Zeit). Untersuchungen des Fraunhofer IVV haben gezeigt, dass sich jedoch mittels adaptiver Prozessführung bis zu 60% der Reinigungsressourcen einsparen lassen. Zur Lösung dieser Herausforderungen wurde daher am Fraunhofer IVV gemeinsam mit dem Projektpartner Hohe Tanne bereits der Adaptive Jet Cleaner (AJC) entwickelt. Der Zielstrahlreiniger arbeitet mit zwei unabhängig voneinander angetriebenen Achsen und ermöglicht es durch frei programmierbare Reinigungsbahnen, gezielt jeden Punkt in einem Tank anzufahren. Zusätzlich können vorprogrammierte Reinigungsabläufe hinterlegt werden, sodass er eine anhand der Geometrie und des zu erwartenden Verschmutzungszustands ortsaufgelöst optimierte Reinigung durchführen kann.
Optischer Inline-Verschmutzungssensor
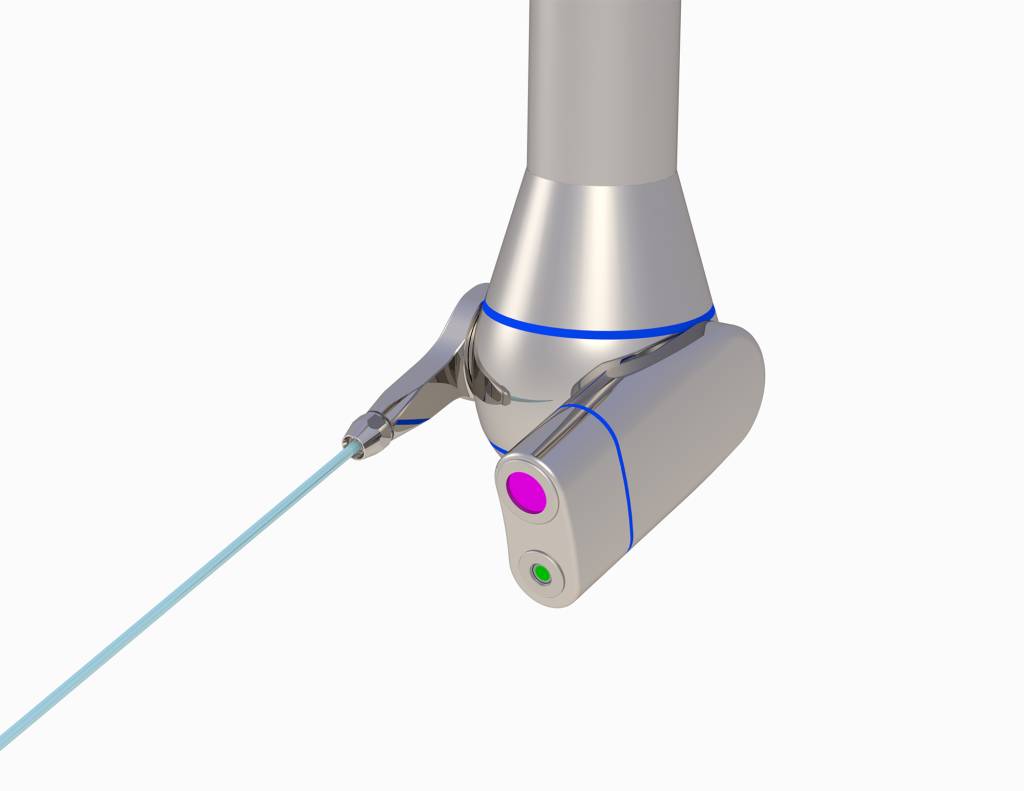
Zur Ausschöpfung des vollen Potenzials wurde das System nun technologisch weiterentwickelt. Durch den Einbau eines hochintegrierten optischen Inline-Verschmutzungssensors in dem 360° in allen Richtungen beweglichen Düsenkopf des AJC ist nun ein ganzheitliches, permanentes Inline-Monitoring des Tankreinigungsprozesses möglich. Die minimalinvasive Integration des Sensors im Tank als hochintegrierter Bestandteil des Tankreinigungssystems erfordert keinen zusätzlichen Implementationsaufwand und ermöglicht eine Echtzeit-Erfassung des aktuellen Verschmutzungszustands. Partner bei der Entwicklung des Sensors waren Matrix Vision und IIM. Eine weitere Neuerung ist die integrierte Höhenverstellung. Damit können nun auch Sprühschattenbereiche etwa hinter komplexen Innengeometrien wie z.B. Leitblechen, Rührwerksschaufeln oder Sensoranschlüssen detektiert, kontrolliert und mit direktem Strahlimpact gezielt gereinigt werden.
Bild 1 | Der AJCsens ermöglicht dank eines optischen Inline-Verschmutzungssensors ein permanentes Inline-Monitoring für eine adaptive, vollumfänglich dokumentierbare Reinigung. – Bild: Hohe Tanne GmbH 
Bild: Fraunhofer-Institut IVV
Verschmutzungserkennung per UV
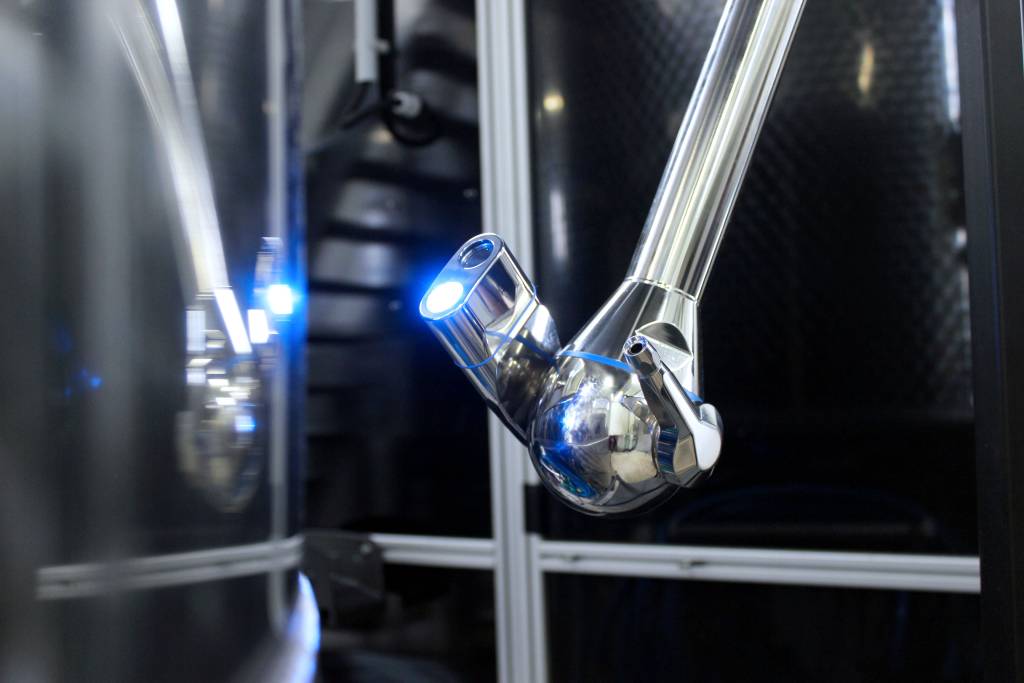
Die Verschmutzungserkennung erfolgt auf Grundlage von Fluoreszenz, die durch UV-Licht einer Spotbeleuchtung von IIM angeregt wird. Das von den Schmutzpartikeln emittierte Licht ist energieärmer als das zuvor absorbierte – für ein kontrastreiches Kamerabild ist daher eine hohe Lichtleistung erforderlich. Diese wird durch den Einsatz einer High Power UV-LED sowie einer integrierten Leistungselektronik realisiert. Eine Optik vor der LED bündelt zudem das Licht auf einen definierten Bereich, denn je geringer der Verschmutzungsgrad, desto lichtstärker und punktueller muss beleuchtet werden. Die hohe Leistung bewirkt jedoch, dass die Fluoreszenz der Verschmutzung durch das Licht der Beleuchtung selbst überstrahlt wird. Nur durch die Trennung von Anregungs- und Transmissionswellenlänge mithilfe aufeinander abgestimmter Objektiv- und Beleuchtungsfilter kann das Licht der Beleuchtung aus dem Kamerabild eliminiert werden. Als Ergebnis erscheinen die fluoreszierenden Schmutzpartikel im Kamerabild hell leuchtend auf dunklem Untergrund.
Die Beleuchtung ist direkt in das Gehäuse des Systems integriert, was ein besonders kompaktes Design erforderlich macht und die Wärmekonvektion erschwert. Durch das spezielle Gehäuse und die Verwendung hochleitender Materialien wird die entstehende Wärme weitestgehend über das integrierte Luft-Kühlsystem abgeführt. Trotz des beengten Bauraums ist die gesamte Leistungselektronik in das Beleuchtungsgehäuse integriert. Diese ist Teil der intelligenten Prozesssteuerung, sodass die Beleuchtung synchron zur Kamera gepulst werden kann.
www.lumimax.de
www.ivv.fraunhofer.de
Der Beitrag entstand anhand von Texten