
Insbesondere in der Lebensmittel- und Pharmaindustrie bedeutet eine fein polierte, qualitativ hochwertige Oberfläche auch eine geringere Verschmutzungsgefahr. Manuelles Schleifen erfordert bei solchen Arbeiten sehr hohe Anstrengungen und kann aufgrund der großen Mengen an Staub zudem eine Gesundheitsgefährdung darstellen. Eine gleichbleibend hohe Schleifqualität sowie die Wirtschaftlichkeit der Schleifprozesse lassen sich dementsprechend nur durch einen erhöhten Automatisierungsgrad erreichen – sogar bei kleineren Chargen bis hin zu Losgröße 1. Hierfür ausgelegt ist die neue Generation an Polier- und Schleifmaschinen von Peitzmeier mit PC-based Control und Twincat.
Hohe Präzision und Dynamik
PMA Pacific, der Peitzmeier-Partner für Asien, setzt bereits bei den konventionellen Maschinen auf PC-based Control. Das Programmieren, Einteachen und Bedienen der neu entwickelten roboterbasierten Systeme erfolgt nun ebenfalls mit der Automatisierungssoftware Twincat. „Twincat bietet umfangreiche Funktionen, um die Anforderungen der Polier- und Schleifmaschinen zu erfüllen“, erklärt PMA-Geschäftsführer Yue Yang Zhu. „PC-based Control und insbesondere Twincat ergeben eine hervorragende Echtzeitfähigkeit, sodass sich damit auch eine komplexe Bewegungssteuerung realisieren lässt.“ Das Automatisierungssystem der neuen Schleifbandmaschinen besteht aus einem leistungsfähigen Industrie-PC vom Typ CX2020, dem Multitouch-Control-Panel CP2915 sowie dem Hochleistungs-Multiachs-Servosystem AX8000 und den dazugehörigen Servomotoren. Zudem sind Twinsafe-Komponenten in das Gesamtsystem integriert worden, um die entsprechende Maschinensicherheit zu erreichen.
Die X- und Y-Achse des integrierten Roboters entsprechen der Struktur einer Portalachse. Die ABC-Achsen verfügen über je einen Servomotor sowie über die Z-Achse eines Schleifkopfes. Auf diese Weise lässt sich eine gerade Linie und eine rotierende Bewegung mit sechs Freiheitsgraden realisieren. Der modulare Ethercat-basierende Kompaktantrieb AX8000 kombiniert leistungsfähige FPGA-Technik mit Multicore-ARM-Prozessoren. Dabei ermöglichen FPGA-basierte Regelalgorithmen mit einer Mehrkanal-Stromregelungstechnologie Abtast- und Reaktionszeiten kleiner 1µs bei der Stromregelung sowie Drehzahlregler-Zykluszeiten – je nach konfigurierter Schaltfrequenz – ab 16µs. Die Anforderungen hinsichtlich eines breiten Motorregelbereichs und hochdynamischer Roboteraktionen lassen sich somit sehr gut erfüllen.
Zusammen mit dem Ethercat-Klemmensystem ergibt sich laut Yue Yang Zhu die erforderliche Datenübertragungsrate und Flexibilität, um das leistungsfähige und modulare Design- und Fertigungskonzept von PMA Pacific zu realisieren. Mit Twinsafe könne man zudem die notwendigen Sicherheitsfunktionen als integralen Bestandteil der Steuerungslösung implementieren: Wird z.B. die Nothalt-Taste betätigt oder reißt das Schleifband, wird der Antrieb über eine Ramp-Down-Funktion schnellstmöglich gestoppt, bevor der Hauptantriebsmotor ohne Drehmoment arbeitet. Optische Sensoren schützen den Setup-Modus, indem Twinsafe den Vorschub auf 2m/min reduziert.
Softwarestruktur für flexible Schleifprozesse
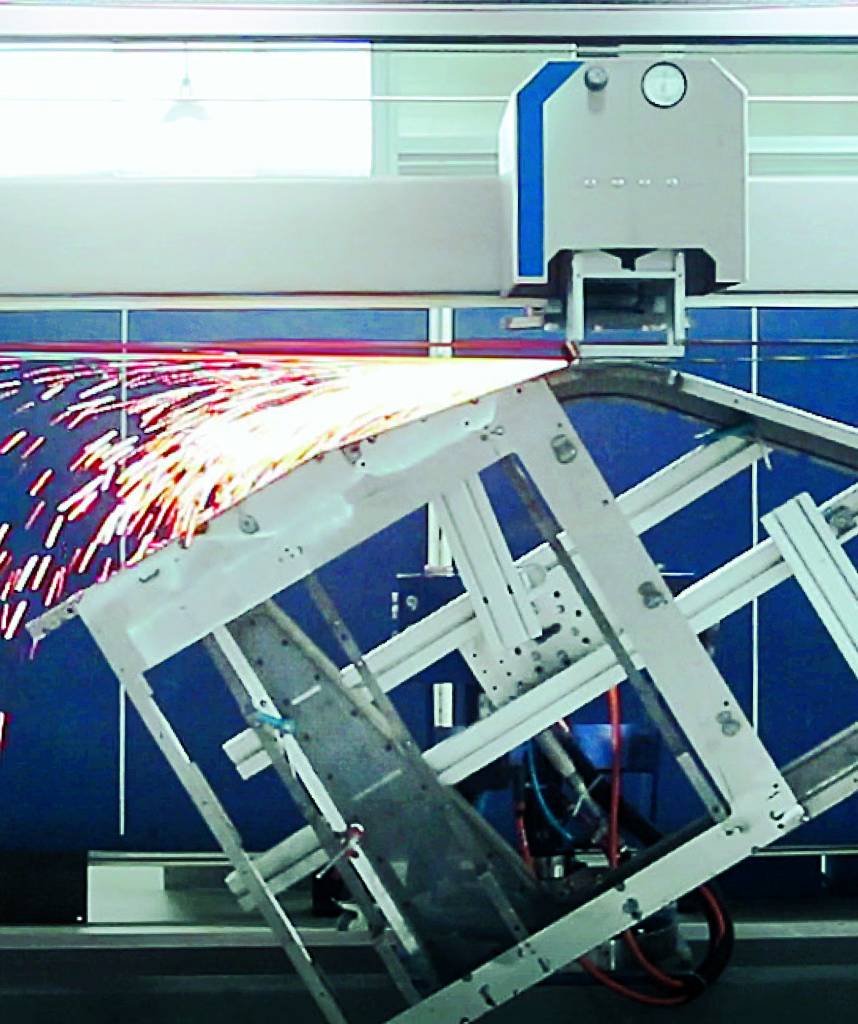
Bei herkömmlichen Schleifmaschinen können lediglich der Schleifkopf sowie die Bewegung in X- und Y-Richtung automatisch gesteuert und somit nur ebene Flächen geschliffen werden. Bei gekrümmten Flächen oder einem entsprechenden Übergang zwischen zwei ebenen Flächen ist ein manueller Eingriff erforderlich. Die neuen roboterbasierten Polier- und Schleifmaschinen können hingegen nicht nur ebene Flächen automatisch schleifen, sondern auch gekrümmte Werkstücke. Für die passende Bewegung in sechs Freiheitsgraden müssen lediglich über ein Handrad die Werkstückkonturen verfolgt, der Startpunkt eingelernt und der gewünschte Vorschub eingeben werden. Derzeit lassen sich für jedes Werkstück acht Oberflächen definieren, für die jeweils bis zu 32 Übergangspunkte und acht Schleifabläufe möglich sind.
Die Bahnbewegungen des Roboters werden mit Twincat 3 NC I realisiert, indem man Punkte über den Touchscreen einlernt. Sind die Schleifabläufe festgelegt, werden die Blechteile automatisch zugeführt, die ebenen, Bogen- bzw. unregelmäßigen Flächen mithilfe der Bahninterpolation geschliffen und die Werkstücke abschließend entladen. Twincat 3 NC I kann hierfür Bewegungen der Dreiachsen-Interpolation und fünf Hilfsachsen realisieren. Die zahlreichen G-Code-Anweisungen und Transitionen stellen sicher, dass die Robotik die Teach-Punkte präzise passiert und sich die Engineeringeffizienz verbessert.
Modulare Steuerungstechnik
Zu den Hauptvorteilen zählt aus PMA-Sicht die Möglichkeit, die Steuerungstechnik modularisieren und ein exakt passendes Steuerungssystem aufbauen zu können. Ein weiterer wichtiger Faktor sei die schnelle und einfache Programmierung sowie die Flexibilität bei der Bearbeitung verschiedener Werkstückgeometrien. „Twincat bietet ein hohes Maß an Anwendungsflexibilität“, resumiert Yue Yang Zhu und blickt voraus: „Zukünftig wird es eine Reihe neuer Schleifverfahren geben, z.B. den Import von grafischem G-Code, das Robotergreifen und die Synchronisation von Antriebsriemen.“ Die Steuerungstechnik von Beckhoff könne all diese Anforderungen abdecken. „PC-based Control bietet uns den großen Vorteil, dass wir den Robotereinsatz bei Schleifmaschinen durch die Integration von Bewegungssteuerung, Robotikalgorithmen und Visualisierung realisieren können.“