

Bild: QB Robotics srl 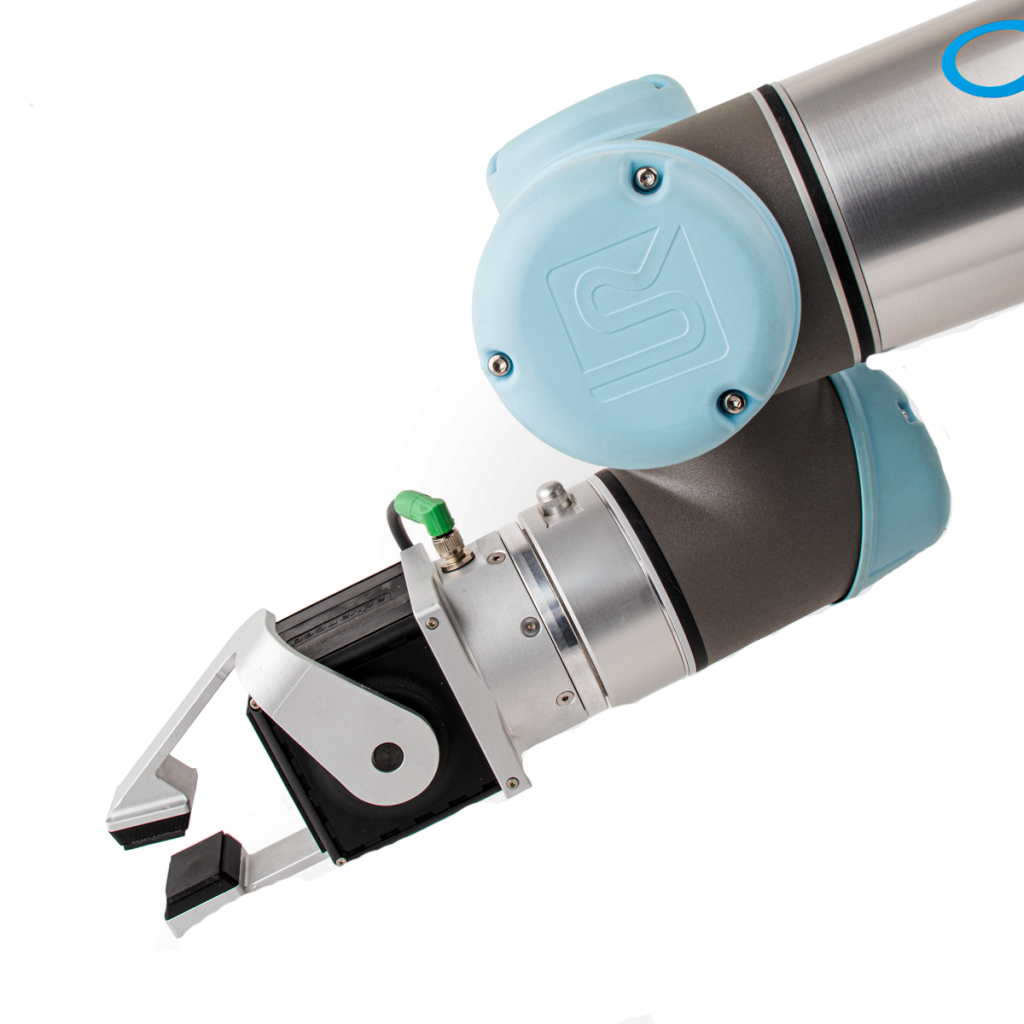
Bild: QB Robotics srl
QB Robotics hat mit QB Softclaw einen Endeffektor für das UR-Ökosystem entwickelt. Mithilfe der selbst entwickelten Lösung Variable Stiffness Actuator kann der Greifer seine Greifkraft an das jeweilige Objekt anpassen. Durch die Integration des URCaps Plug-Ins können Anwender den Greifer anschließen, das Universal-Robots-Modell starten und müssen dann nur noch die erforderliche Greifkraft wählen, weich, mittel oder hart.