
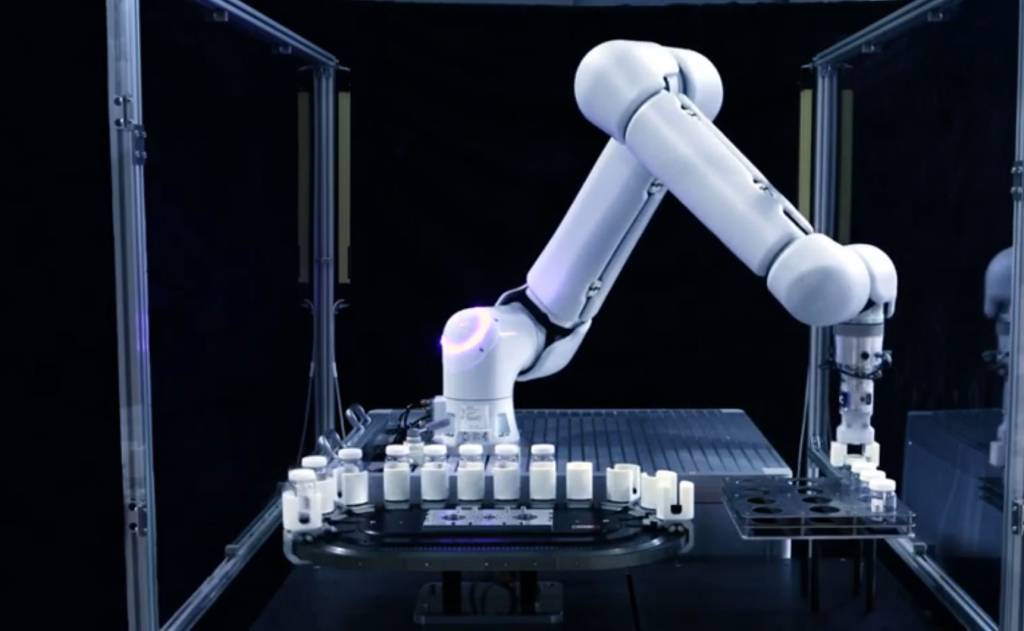
Auf YouTube zeigt Denso anschaulich, wie der kollaborative Roboter Cobotta Pro bei Pick&Place-Aufgaben dieselbe Leistung erbringen kann wie nicht kollaborierende Roboter. Im nicht-kollaborativen Modus arbeitet der Cobotta Pro mit einer maximalen TCP-Geschwindigkeit von 2.500mm/s bei einer Wiederholgenauigkeit von ±0,004mm. Die vollständige interne Verdrahtung trägt dabei zur Verringerung des Risikos von Kabelunterbrechungen und zur Reduzierung des Verdrahtungsaufwands bei. Der Betriebsmodus des Roboters lässt sich in den kollaborativen Modus ändern, indem die optionale berührungsempfindliche Softcover-Abdeckung angebracht wird.
Hier geht’s direkt zum Video!