
Im Mai erhielt Schunk den German Innovation Award. Die Jury würdigte damit den bionisch inspirierten Greifer Adheso, den Schunk gemeinsam mit Innocise marktfähig machte.
Rubrik: Schwerpunkt Greif- & Spanntechnik
Universal- Parallelgreifer
Bei der Parallelgreifer-Serie CGS von IPR wurde die Wirkfläche des ovalen Kolbens für die Geometrie des Grundkörpers angepasst, um hohe Greifkräfte zu ermöglichen.
Vielseitiger Kurvenklemmgreifer

Der Kurvenklemmgreifer der Serie 84N5 von Destaco verfügt über eine Betätigungsgeschwindigkeit von 78ms und gewährleistet eine Greifkraft von 1.200N bei 5bar (72,5psi).
Greifer mit integrierter Bildverarbeitung
Der Billet Picker von Picki-it eignet sich für Anwendungen in der Metallverarbeitung und der Automobilindustrie.
Vakuumgreiflösungen für Roboteranwendungen
Piabs PiSafe-Programm stellt konfigurierbare und leichtgewichtige Lösungen bereit, die an die spezifischen Anforderungen des Nutzers angepasst werden können.
Open-Source-Referenzdesign für die Entwicklung von Endeffektoren

Trinamic Motion Control hat ein vollständig integriertes Open-Source-Referenzdesign vorgestellt, das die Entwicklung von industriellen Roboterendeffektoren vereinfachen soll.
Modulares Greifsystem erweitert
Das modulare Greifsystem mGrip von Soft Robotics ist eine Suite konfigurierbarer Greifer- und Steuerungsprodukte, die eine zuverlässige Hochgeschwindigkeitskommissionierung von schwer zu greifenden Gegenständen in der Lebensmittel- und Konsumgüterindustrie ermöglichen soll.
Kopplungsgreifer mit Flansch

Gimatic hat seine AGG-Serie an Kopplungsgreifern mit Flansch um eine Variante für höhere Genauigkeiten erweitert.
Vakuumgreifereinheit für kollaborative Roboter

SMC hat mit der Serie ZXP-X1 sein Vakuumportfolio weiterentwickelt.
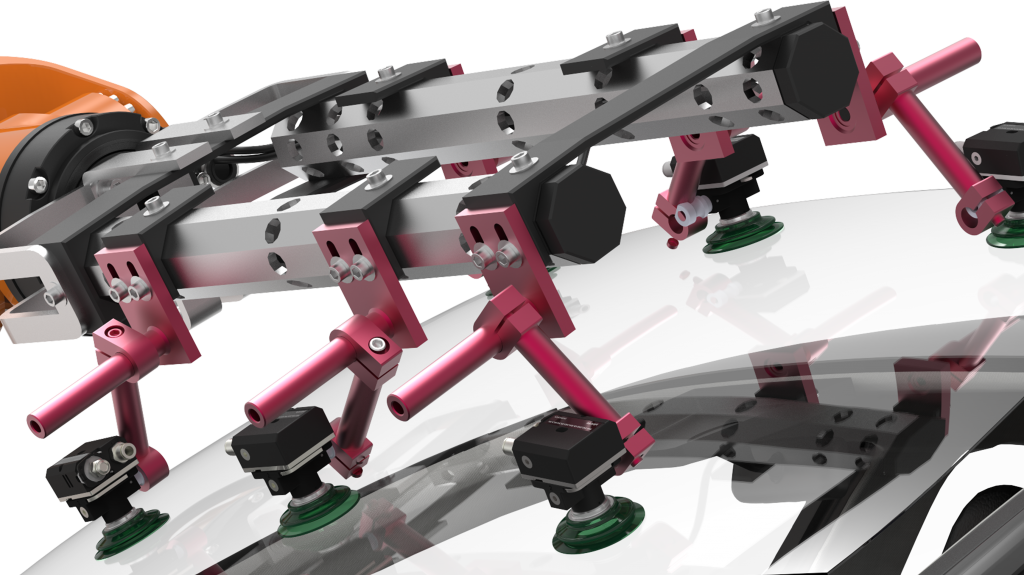
Verbindet Greiferwelten

Flexible Greiferkonzepte vervielfachen die Einsatzmöglichkeiten von Robotern und machen sie dadurch erst richtig lukrativ. Dabei erfreut diese Form der Automatisierung nicht nur die Controller im Betrieb – effizientere Abläufe und kürzere Lieferketten reduzieren auch den CO2-Fußabdruck. Um noch mehr Flexibilität zu erreichen, haben Schmalz und Zimmer nun gemeinsam eine multifunktionale End-of-Arm-Plattform als eigenständiges Ökosystem entwickelt.