
Wie ein Roboter aussieht, kann eine Rolle spielen, muss es aber nicht. Von Nanorobotern über Drohnen, selbstfahrende Autos bis hin zu Roboterarmen reicht das Spektrum. Form follows Function gilt nicht nur im Design, sondern auch in der Robotik. Gut regelbar sind Anwendungen, in denen der Roboter klare Aufgaben vorgesetzt bekommt. So z.B. Paprikas im Treibhaus pflücken. Klar ist: Das Werkzeug der Neuzeit muss seinen Zweck erfüllen.
Der laufende humanoide Roboter: Ist er wirklich gewollt?
Professor Rixen aus dem Lehrstuhl für angewandte Mechanik der TU München, der unter anderem am humanoiden Roboter Lola forscht, weiß, was es bedeutet, einem zweibeinigen Roboter das Laufen beizubringen, besonders auf unebenem Grund. Sollen noch dazu Gläser transportiert werden, die nicht überschwappen dürfen, steigen die Anforderungen an einen humanoiden Roboter-Ober im Restaurant weiter. „Lola wurde vor fünfzehn Jahren als steife Maschine gebaut, die sich präzise regeln lässt“, erläutert Rixen die Grundlagenforschung am Mechanik-Lehrstuhl. „Heute wissen wir, dass mehr Flexibilität und Nachgiebigkeit in den Gelenken wichtig ist. Wenn Lola stolpert, kann man weniger als sieben Mal pro Sekunde effizient nachregeln“, so der Professor. Konkret nutzen Algorithmen Bewegungsmessungen im Brustbereich, um Motoren und Gelenke zu steuern. Doch im Vergleich dazu spielt der in Jahrmillionen entwickelte Mensch noch immer in einer anderen Liga. „Den Muskel eines Roboters so effizient machen wie den eines Menschen“ nennt Rixen den heiligen Gral der Robotik. Noch kann die Maschine keine Energie speichern und später wieder freisetzen, so wie etwa die Achillessehne einen wichtigen Impuls für das Gehen gibt. Mechanisch gesehen würde das erfordern, Federn über die Gelenke einzubauen, was dann zu aktuell noch schwer regelbaren Schwingungen führen kann.
„Der humanoide Roboter ist ein Forschungsideal“, sagt Prof. Alin Albu-Schaeffer. Der Robotikexperte am Deutschen Zentrum für Luft- und Raumfahrt (DLR) und an der TU München spricht in diesem Zusammenhang vom Zehnkampf der Ingenieurwissenschaften. Mechanik, Informatik, Medizin, Elektrotechnik, Ethik sind nur einige der wissenschaftlichen Disziplinen, deren Expertise bei der Entwicklung von Robotern gefragt ist. Der Leiter des Instituts für Robotik und Mechatronik am DLR und Professor für sensorbasierte Robotersysteme und intelligente Assistenzsysteme an der Universität forscht an der technischen Umsetzung von Robotikkonzepten.
Etwas besser als der Mensch
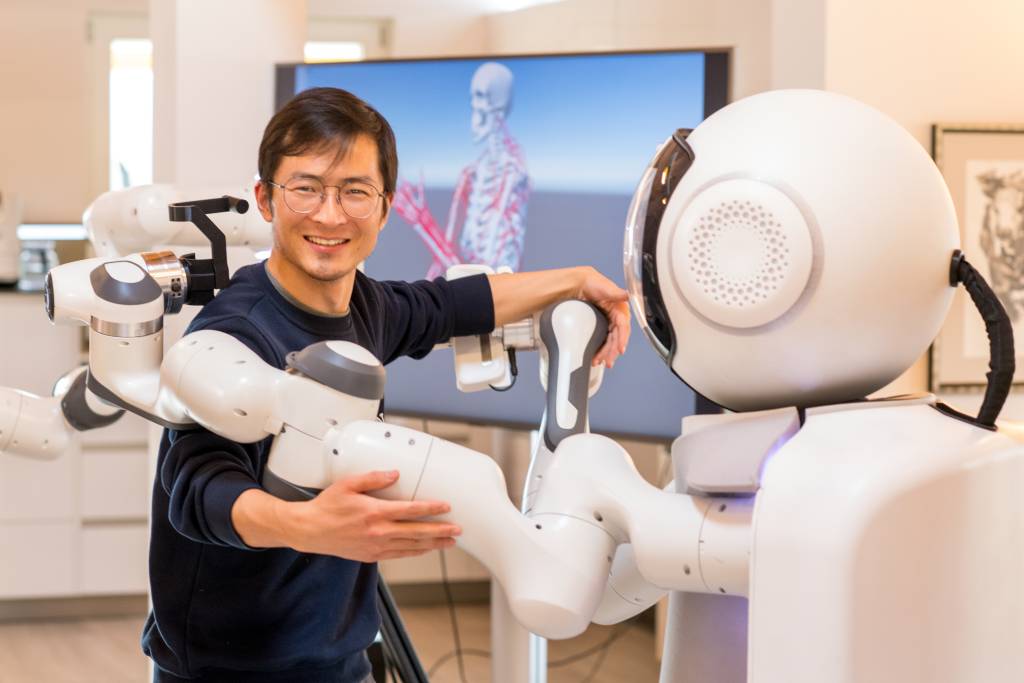
Für Albu-Schaeffer ist klar: „Je menschlicher die Umgebung eines Roboters und je vielfältiger seine Aufgaben sein müssen, umso wichtiger ist, dass er humanoid ist.“ Und er nennt eine weitere Anforderung: „Dass er es schafft, etwas besser zu sein als der Mensch – etwa schneller zu laufen, präzisere Handgriffe zu machen oder zu fliegen“. Zuhilfe kommen dem Cobot-Ansatz, den der Leiter des Munich Institute of Robotics and Machine Intelligence (Mirmi), Prof. Sami Haddadin, mit auf den Weg gebracht hat, erhebliche Fortschritte in der künstlichen Intelligenz. Bild- und Spracherkennung bis hin zum Sprachgenerator ChatGPT und Echtzeitlösungen ermöglichen künftig weitere Entwicklungen, die ein wichtiges Ziel vor Augen haben: Dass sich der Roboter in jeder Umgebung im Alltag zurechtfinden kann. Wichtigster Protagonist der Cobot-Forschung im Mirmi ist Garmi, ein Pflegeroboter aus dem Forschungszentrum Geriatronik in Garmisch-Partenkirchen, der für den Umgang mit pflegebedürftigen und älteren Menschen konzipiert ist.