
Heutzutage können Bediener den Arm des Roboters mit der Hand entlang der gewünschten Trajektorie führen und dann die Punkte mit dem Teach Pendant aufzeichnen. Das erleichtert das Programmieren von Robotern für Bediener mit geringen Robotikkenntnissen erheblich, aber die Verwendung eines Programmierhandgeräts kann immer noch mühsam sein, vor allem in Bezug auf den Zeitaufwand für die Programmierung. Der Grund dafür? Zwischen der Bedienung des Roboters und der Eingabe von Anweisungen über das Interface muss viel physisch hin und her gewechselt werden.
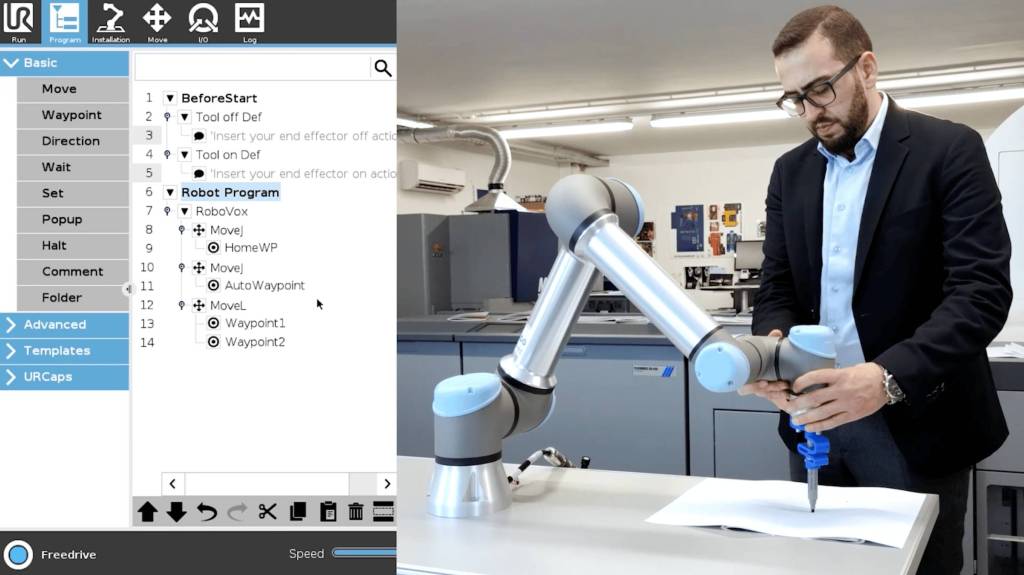
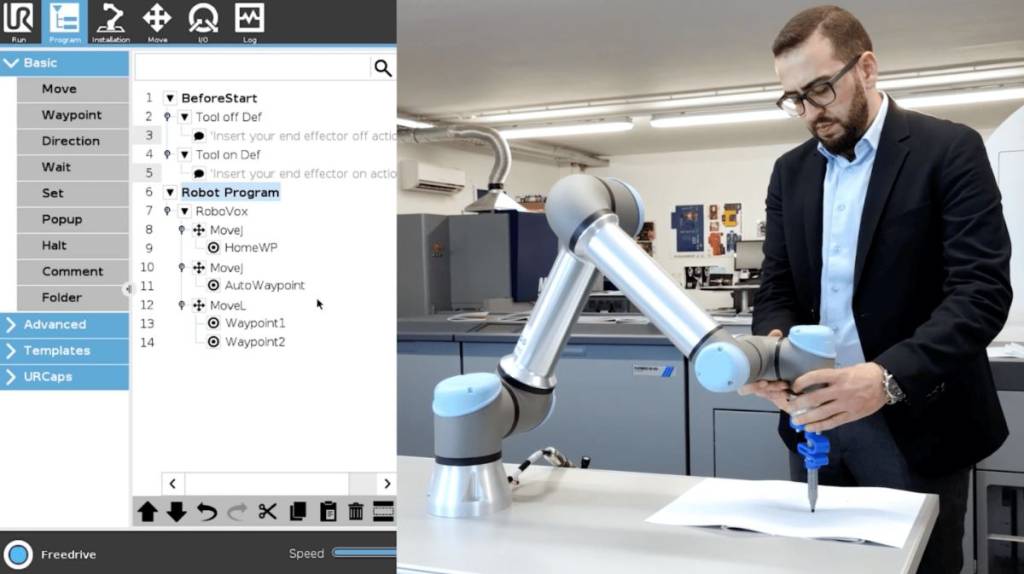
Neue Lösungen für die Programmierung Mit sprachgesteuerten Anwendungen wie CoboVox können Bediener mit Hilfe von Sprachanweisungen Positionen und Parameter aufzeichnen und das gewünschte Programm einlernen. Das folgende Beispiel zeigt, wie ein Cobot mit der menschlichen Stimme programmiert werden kann, ohne sich ständig zwischen Roboterarm und Teach Pendant hin und her zu bewegen. Der Bediener bringt den Roboter manuell in eine Ausgangsposition und sagt dann dem Roboter, dass er diese Position speichern soll: „Diese Position als Ausgangsposition speichern.“ Nach dem Speichern fragt er den Roboter, was der nächste Schritt ist: „Erledigt. Was ist der nächste Schritt?“ Auch hier bewegt der Bediener den Roboterarm physisch zur nächsten Position und sagt dem Roboter, dass er diese Position als Wegpunkt 1 speichern soll, z.B. so: „Diese Position als Wegpunkt 1 speichern.“ Dann wird der Arbeitsablauf fortgesetzt, bis das gesamte Programm abgeschlossen ist. Die Sprachanwendung kann auch reagieren und den Bediener nach den nächsten Schritten des Programms oder nach Erläuterungen fragen, um sicherzustellen, dass die Befehle richtig verstanden wurden.
Bei der Programmierung mittels Pen wird ein Stift in der Hand gehalten und auf den Werkzeugmittelpunkt (TCP) des Roboters ausgerichtet. Während der Bediener die gewünschte Bahn verfolgt, zeichnet der Roboter die Bewegungen des Stifts auf. Der Bediener kann dann die erstellte Bahn und die Punkte mit dem Teach Pendant anpassen.
Ähnlich wie bei der Stiftprogrammierung können Bediener auch einen Joystick verwenden, um Cobots durch verschiedene Ausrichtungen, Pfade und Geschwindigkeiten zu führen und Positionen aufzuzeichnen. Einige Roboter verfügen sogar über einen integrierten Joystick. Das kann den Prozess der Handführung verbessern, da eine präzisere Einstellung der Position ermöglicht wird.
Einige Entwickler haben spezielle Softwareanwendungen entwickelt, die auf Smartphones oder Tablets laufen. Diese Apps ermöglichen es den Benutzern, die Programmierschnittstelle leicht zu verstehen, da sie nur relevante Informationen über die zu programmierende Aufgabe anzeigen. Mithilfe einer kontrollierten Umgebung und der bekannten auszuführenden Aufgabe können sie auch vorprogrammierte Aufgaben oder Sequenzen enthalten, wie z.B. das automatische Hinzufügen der An- und Abfahrtspunkte.
Teachen ohne Teach Pendant
Alle diese No-Code-Lösungen reduzieren die Komplexität der Roboterprogrammierung, indem sie sich auf Ansätze konzentrieren, die dem Bediener vertraut sind. Die sprachgesteuerte Roboterprogrammierung ist jedoch die einzige Methode, bei der die Hände nicht mit einem Teach Pendant interagieren müssen; der Bediener kann sich auf die anstehenden Aufgaben und das Robotersystem konzentrieren, während er den Ablauf per Sprache aufzeichnet und anpasst.