
Konzeptgrafik von PowerGrasp – Bild: PowerGrasp 
TWINflex®-Stretch Leiterplatte – Bild: Würth Elektronik CBT
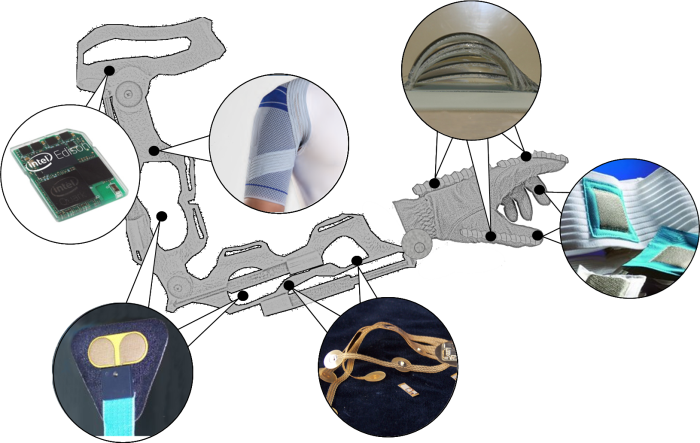
Unter der Federführung von Würth Elektronik arbeiteten verschiedene Unternehmen mit Forschungseinrichtungen im BMBF-geförderten Projekt PowerGrasp zusammen. Jetzt wurde es nach dreijähriger Laufzeit erfolgreich abgeschlossen. Ziel war es, eine aktive Orthese mit weicher Mechanik für Arm und Hand zu entwickeln, um die Unterstützung von Arbeitskräften bei händischen, muskoskelettalen und belastenden Tätigkeiten zu erreichen. Dabei wurden moderne Textilien untersucht, in die elektronische Bauteile sowie kraftverstärkende pneumatische Antriebselemente eingebaut werden können. Das Ergebnis ist eine softrobotische Orthese zum Anziehen. Weitere Arbeiten beschäftigten sich mit smarten Materialien, etwa zur Erfassung der Muskelaktivität. Mithilfe von Algorithmen kann Muskelermüdung erkannt und bei Bedarf die Unterstützung angepasst werden. Einen wichtigen Beitrag leistete die Miniaturisierung der Elektronik und Pneumatik durch den Einsatz von den flexiblen und dehnbaren Leiterplatten vom Typ Twinflex-Stretch. Langfristig wollen die Projektpartner daraufhin arbeite, ein Ganzkörper-Exoskelett/Suit zur Kraftunterstützung aller Bewegungen zu entwickeln.