
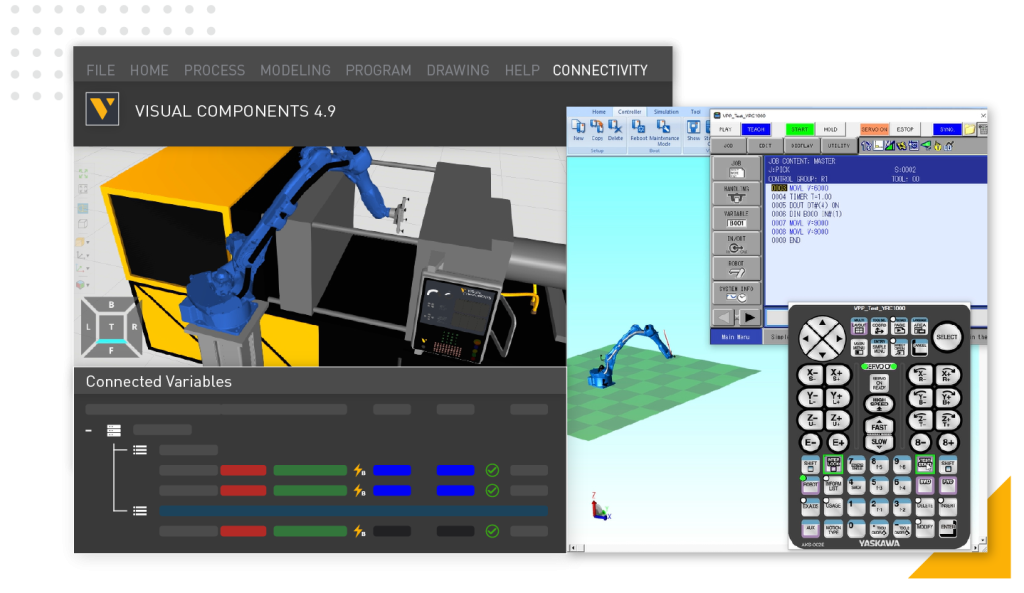
Visual Components hat die Version 4.9 seiner Anwendung zur Fertigungssimulation und Roboter-Offline-Programmierung (OLP) veröffentlicht. Große und komplexe Fabriklayouts können im Release über Sub-Layouts unterteilt werden. Die Komponenten können nach Typ, Marke oder nach einer benutzerdefinierten Variable gruppiert und hierarchisch verschachtelt werden. Außerdem unterstützt die Planungsanwendung nun auch Robotersysteme von Kawasaki und Yaskawa per Plugin. Durch die Integration der proprietären Robotersoftwares K-Roset und MotoSim stehen den Anwendenden auch die darin integrierten Simulationsfunktionen zur Verfügung. Version 4.9 bietet den Anwendenden neue Möglichkeiten, den OLP-Kalibrierungsprozess zu steuern. Geführte Anweisungen und Berichte sollen die Fehlerwahrscheinlichkeit reduzieren. Die neu gestalteten Werkzeuge zur Kalibrierung sollen vielmehr sicherstellen, dass jede programmierte Bewegung die beabsichtigten Aktionen in der realen Roboterzelle widerspiegelt.
www.visualcomponents.com