
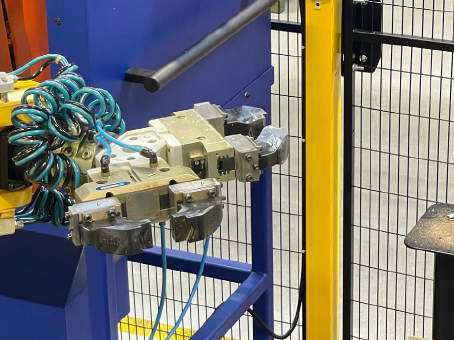
Beulco setzt Parallel- und Sauggreifer für das Werkstück-Handling mit Robotern ein. Bei der Metallbearbeitung müssen die Werkstücke erst entgratet und dann zerspanend bearbeitet werden. In beiden Prozessschritten wird die Bestückung der Anlagen durch Roboter realisiert. Alle gepressten Werkstücke weisen dabei individuelle Konturen und eine Variantenvielfalt von über 300 unterschiedlichen Ausführungen auf. Die Möglichkeit, die Bauteile für den Robotergreifer noch während des Drucks mit einer Carbon-Endlosfaser zu verstärken, war das Hauptkriterium für die Entscheidung, auf 3D-Druck bei der Herstellung der Greifer zurückzugreifen. Ein erstes Musterbauteil von Mark3D konnte auf dem eigenen Prüfstand überzeugen. Für den tatsächlichen Einsatz wurde die Anbindung der Greifer dann von einem Kraftschluss zu einem Formschluss verändert. Die Nut des Greifers wird in eine C-Nut des Roboters geschoben, mit einer Platte eingeklemmt und verschraubt. Durch den modularen Aufbau können die Greifer nun in beiden Bearbeitungsschritten an den Roboteranlagen eingesetzt werden.