
Ebenso ist die Qualitätskontrolle beispielsweise in Großbäckereien ein mögliches Einsatzgebiet. Dort werden Teigfladen automatisch portioniert und zur Weiterverarbeitung befördert. Ein Sensor über dem Förderband vermisst die Ausmaße in 3-D und stellt sicher, dass die Fladen das vorgegebene Volumen haben.
Dynamische Datenausgabe mit Time-of-Flight
Das Time-of-Flight-Verfahren zeichnet sich vor allem durch seine Reichweite und Signalfrequenz aus. Erfassung sowie Ausgabe der Signale sind hier für Anwendungen mit größerem Messbereich und kurzen Reaktionszeiten optimiert. Der ToF-Sensor besteht aus einer einzelnen Kamera mit einer VGA-Auflösung von 640×480 Pixel, die durch eine hohe Messrate von 30Hz die Grundlage für einen ausgedehnten Messbereich und eine schnelle Reaktion in der Maschinensteuerung schafft.
Eine weitere Stärke ist die Unempfindlichkeit des Sensors gegenüber Fremdlicht. Sie beruht auf dem Infrarotlicht, die er mit seiner DuraBeam-Beleuchtung emittiert. Dessen Wellenlänge von 940nm hat einen genügend großen Abstand vom Frequenzbereich des natürlichen Tageslichts ebenso wie von künstlicher Beleuchtung, sodass die Detektion im Innen- sowie Außenbereich von den Lichtverhältnissen unbeeinträchtigt bleibt. Die Detektion per 4-Phasen-Messung steigert zusätzlich die Robustheit des Nutzsignals sowie der Messergebnisse.
Im Einsatz: Palettierung und AGV
Die Kamera nimmt ein zweidimensionales z-Bild auf, wobei sie auch die Distanz zwischen Objekt und Sensor ermittelt. So entsteht ein Tiefenbild mit einer Höhenkarte, welche mit 2D-Informationen in x- und y-Richtung kombiniert wird. Zusammen ergibt dies ein 3D-Punktwolkenbild mit hoher Auflösung. Es bietet die Grundlage für eine 3D-Orientierung in der Bewegung, etwa zur Palettierung oder bei der AGV-Steuerung.
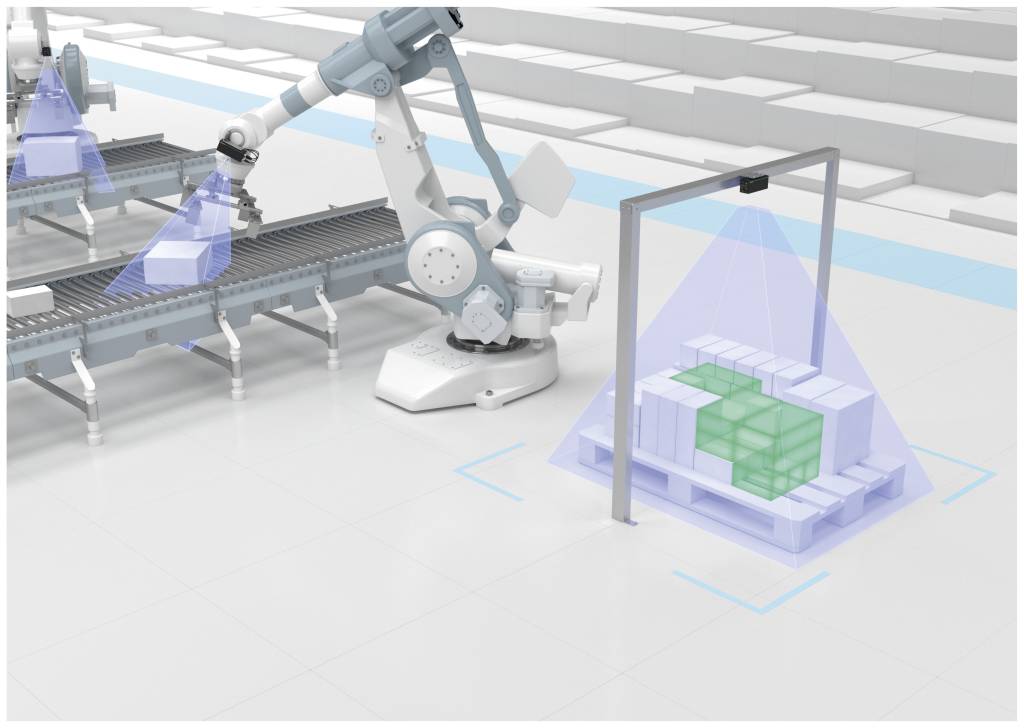
Bei der Palettierung erkennt ein Sensor am Roboterarm das auf dem Förderband ankommende Paket und erfasst seine Abmessungen. Ein weiterer Sensor über der Palette erkennt die noch verfügbaren Plätze. Die Steuerung kann die Pakete auf der Palette nach bestimmten Vorgaben zusammenstellen und unter bestmöglicher Nutzung des Platzes stapeln lassen. Für die AGV-Steuerung wird ein Sensor in Fahrtrichtung zur Erkennung von Hindernissen und angesteuerter Strukturen angebracht. Mit seinen Daten kann zum Beispiel eine Staplergabel in die Aussparungen im Palettenfuß oder ein Transportroboter unter ein anzuhebendes Objekt gesteuert werden.