
Position und Geometrie
Um die jeweiligen Behälter zu unterscheiden sowie in ihrer Position und Geometrie zu messen, setzt FrameSense auf ein formbasiertes Antastverfahren, das nicht mehr Kanten, Löcher oder andere prägnante Bauteilmerkmale untersucht. Stattdessen wird die gesamte geometrische Außenkontur eines ganzen Bauteils erfasst – also dessen Form, Lage und Orientierung. Die Oberflächengeometrie wird mithilfe von spezieller 3D-Sensorik erfasst, wobei Millionen einzelner 3D-Punkte zu einer Punktwolke zusammengesetzt werden. Die Kalibrierung per Kugel oder Platte, der Einsatz integrationsfreundlicher 3D-Sensoren anstelle von Einzelkameras, die helligkeits- und farbunabhängige Messtechnik, der Wegfall von externer Beleuchtung und die Möglichkeit zur virtuellen Vorab-Inbetriebnahme sind dabei nur einige der Vorteile, die sich aus dem neuen Ansatz ergeben.
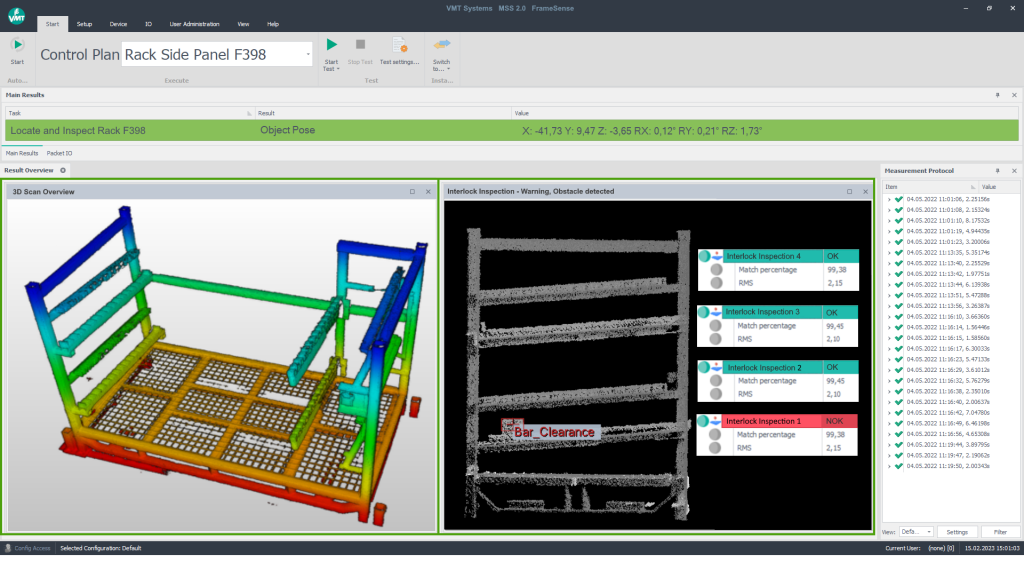
Die Software vergleicht die ermittelten Geometriedaten der Behälter mit hinterlegten CAD-Referenzdaten und nutzt sie zur deren 3D-Positionsbestimmung, zur Verriegelungsüberwachung, zum Erkennen von Anbauteilen, störenden Kanten, Konturen und Objekten sowie zur Qualitäts- und Geometriekontrolle. Die Sensoren als auch die von ihnen erzeugten Daten weisen dabei ein Maß an Redundanz aus, das den möglichen temporären Ausfall eines Sensors kompensiert und dadurch weiterhin stabile und valide Messergebnisse liefert. Somit ist auch in einem solchen Fall höchste Prozesssicherheit ohne Einschränkung der Uptime der Anlage gewährleistet.
Positionstoleranzen
Verschiedene Feldversuche in der Anlage im Rahmen der Projektumsetzung haben bestätigt, dass FrameSense alle spezifizierten Aufgabenstellungen zuverlässig erfüllt. Insbesondere was die Lage- und Positionstoleranz der Behälter betrifft, wollten die beteiligten Partner wissen, was noch geht, d.h. bis zu welchen Randbedingungen ein zuverlässiges Einstapeln der Pressteile durch die Roboter noch möglich sein würde. Die Ergebnisse waren erstaunlich: selbst signifikant verschobene, verdrehte oder verkippte Behälter konnten noch prozesssicher beladen werden. Das Visionsystem ist damit so tolerant, dass es auch eine sehr ungenaue Positionierung oder Ausrichtung noch abfängt – die Bahn des Roboters also so korrigiert, dass die Maschine einstapeln und die Anlage weiterlaufen kann.
Vielfältiges Ausbaupotenzial
Das Lösungspotenzial von FrameSense reicht weit über die beschriebene Projektapplikation des robotergestützten Einstapelns von Fertigteilen in einem Automobilwerk hinaus. So ist es ohne großen Aufwand möglich, die Daten von Behältern mit einer unverwechselbaren Barcode- oder RFID-Kennzeichnung statistisch zu nutzen, um beispielsweise häufig beschädigte Behälter zu identifizieren und mögliche Ursachen zu eruieren. Hierbei können im Rahmen der Qualitätskontrolle die Realdaten von Behältern erfasst, in Mess- und Inspektionsdateien übernommen, durch Statistiktools ausgewertet und für das Lifecycle Management gesichert werden. Behälter lassen sich im Prozess orten und tracken, Behälterkreisläufe werden transparent, auch mögliche Schadenquellen und -verursacher werden identifizierbar. In Analogie zum beschriebenen Projekt kann FrameSense auch bei Automobil-Zulieferern eingesetzt werden, die beispielsweise Türen, Motorhauben oder Dachmodule herstellen und diese für den Transport in das Automobilwerk in entsprechende Ladungsträger einstapeln müssen. Auch auf intralogistische Transporthilfsmittel wie Werkstück- und Werkzeugträger, Kleinpaletten, Kreislaufgebinde und andere Behältnisse kann das System entsprechend angepasst werden – zumal mit abnehmender Behältergröße auch die Systemarchitektur kompakter werden kann, weil beispielsweise weniger Sensoren benötigt werden. Nach dem Entnehmen von Teilen per Roboter hat VMT mit der neuen Systemlösung FrameSense nun auch den umgekehrten Arbeitsschritt – das präzise Positionieren von Teilen in einem Behälter durch einen Roboter – prozesssicher gelöst.