
Der AuMeRo ist eine rechteckige Plattform mit Rädern unten und einem Roboterarm mit einem optischen Messsensor oben. „Dieser Hardwareaspekt ist für sich natürlich noch nicht revolutionär“, erklärt Dr. Matthias Karl von der Konzernforschung der Zeiss Gruppe. „Die wesentliche Aufgabe war, auf der Softwareseite die nötige Intelligenz für die autonome Bewegung zum Objekt, dessen Vermessung und die Datenverarbeitung zu erschaffen.“ Das MRM erarbeitete und implementierte eine Navigationslösung für die mobile Messplattform, durch die sie sich autonom zum Zielobjekt bewegen und dabei auch Hindernisse sicher umfahren kann. Das ILM entwickelte eine Methode zur gleichzeitigen Vermessung von rohen, gefärbten und lackierten Karosserieteilen mit nicht-kooperativen Oberflächen mit demselben Messgerät. Zeiss IQS trug die anwendungsnahe optische Messtechnik bei, während die Zeiss Konzernforschung die Bewegung des Roboterarms, die Objekterkennung und Messposenansteuerung durch optische Bilderkennung in Verbindung mit maschinellem Lernen gewährleistete. Der Applikationspartner BMW gab dem Projekt einen greifbaren Praxiskontext.
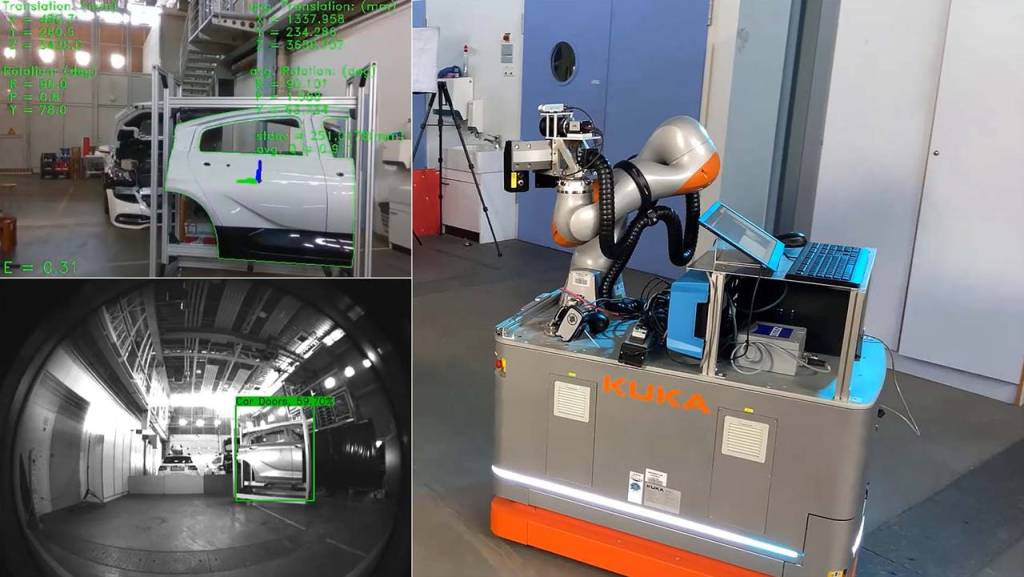
„Der Anwender wählt via Software ein Objekt, zum Beispiel eine Fahrzeugtür, dessen groben Standort und danach den relevanten Messplan. Ab diesem Punkt agiert AuMeRo voll autonom“, erklärt Manuel Schmid. Die Objekterkennung erfolgt via Kamera und basiert auf einem digitalen Zwilling des Objekts. Für die eigentliche Messung wird die mobile Plattform mit zusätzlichen optischen Sensoren ausgestattet: Dazu wurde am ILM ein spezielles Messgerät mit Vorteilen für kurze Messzeiten und robuste Umgebungseinflüsse entwickelt, das Mehrwellenlängen-Digitalholografie nutzt. Auf diese Weise können innerhalb eines Schnappschusses topografische Daten einer gesamten Fläche für diffus und/oder spiegelnd reflektierende Oberflächen gewonnen werden. Nachdem die Plattform das Objekt gefunden und angefahren hat, bewegt der Roboterarm den Messkopf gemäß den Erfordernissen aus dem Messprogramm unter Berücksichtigung der aktuellen räumlichen Gegebenheiten.
www.zeiss.de