
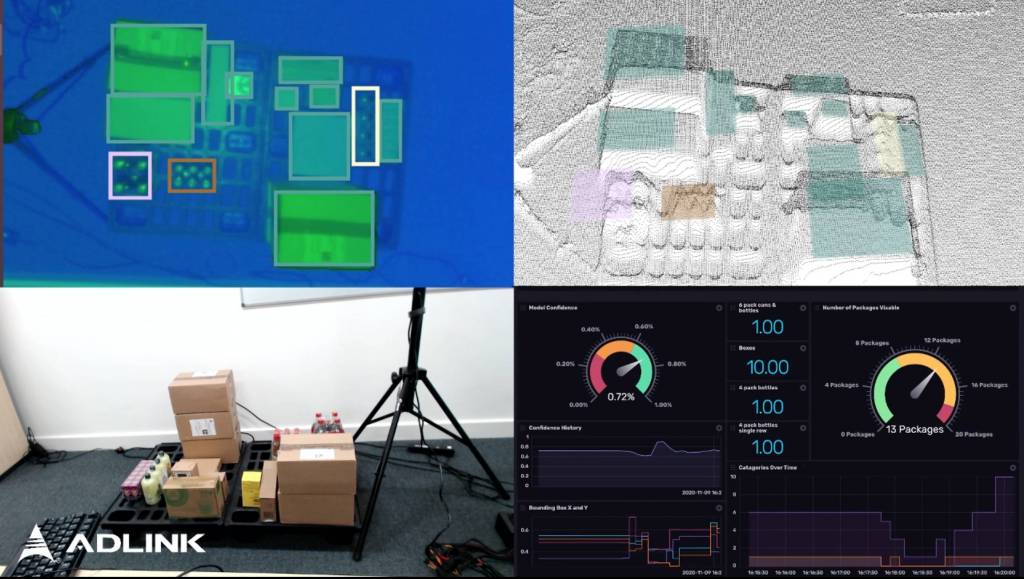
Mit KI-basierter Bildverarbeitung können Palettierungsaufgaben während des laufenden Betriebs automatisiert werden. Um eine Orientierung im Raum beim Greifvorgang durch den Roboter zu ermöglichen, werden 3D-bildgebende Verfahren, wie Time-of-Flight oder Stereo-Vision-Kamerasysteme verwendet. Mit der Software Deep Learning DS von Data Spree lässt sich die Softwarelogik im Hintergrund effizient umsetzen. Zuerst müssen Bilder von den Objekten aufgenommen werden. Dann erfolgt die Zuordnung der Objekte in Klassen. Danach trainiert die KI iterativ die Erkennung und korrekte Zuordnung sowie die Position, Größe und Orientierung der Objekte.