
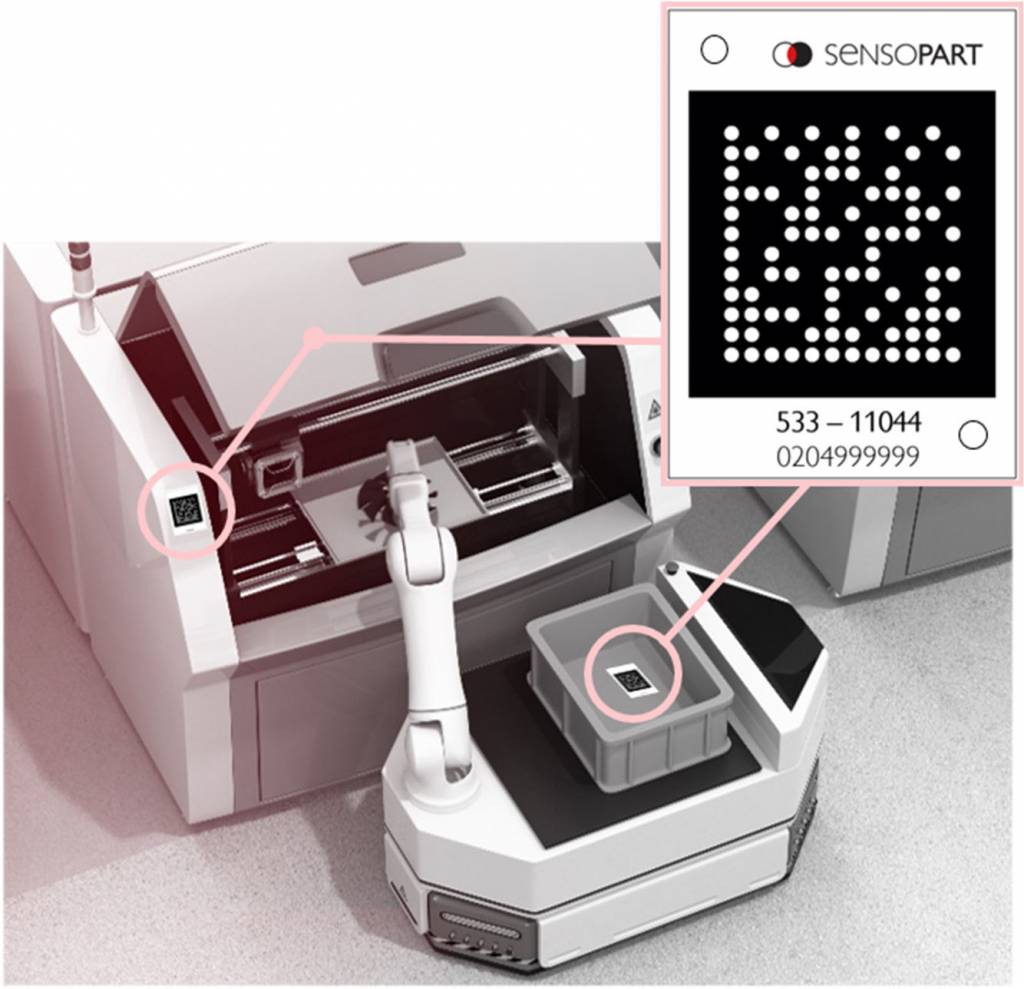
Mit der neuen ‚Target Mark 3D‘-Funktion des Vision-Sensors Visor Robotic von Sensopart wird die räumliche Orientierung von Handling- und Montagerobotern vereinfacht – mit nur wenigen Mausklicks und geringem Programmieraufwand in der Robotersteuerung. Hierfür genügt es, eine Zielmarke anzubringen und in der Konfigurationssoftware des Sensors den Detektor ‚Target Mark 3D‘ auszuwählen. In der Robotersteuerung muss lediglich bei der Ersteinrichtung auf die Position der Zielmarke verwiesen werden. Danach ist der Vision-Sensor in der Lage, die 3D-Information aus dem Bild zu extrahieren und eine etwaige Verschiebung an den Roboter weiterzugeben. Es können auch mehrere Zielmarken innerhalb einer Produktionsumgebung platziert werden, um verschiedene Prozesse zu automatisieren.