
Bild: Mattke AG Servotechnik 
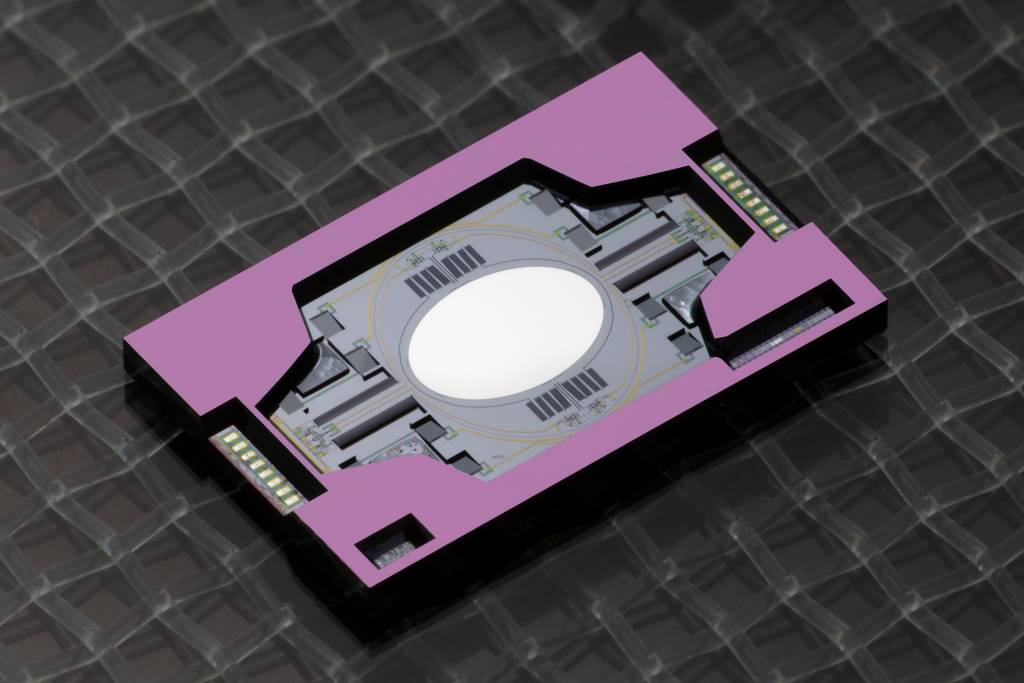
Bild: Fraunhofer IPMS
Damit Roboter ihre Umwelt räumlich wahrnehmen können, hat ein Forscherteam am Fraunhofer IPMS einen Microscanner-Spiegel entwickelt. Ähnlich wie beim menschlichen Sehen sollen Roboter Objekte erfassen können und so anspruchsvolle Aufgaben übernehmen. Für den Ansatz des sogenannten scannenden Auges, der maschinelles Sehen in drei Dimensionen ermöglichen soll, verwenden die Forscher einen MEMS-Scanner-Spiegel, der zur gezielten Ablenkung von Licht verwendet werden kann. Die kompakten mikromechanisch-optischen Bauteile mit integriertem Antrieb sind robust und zuverlässig. Aktuell fokussiert sich das Entwicklerteam auf Design-Varianten für die industrielle Fertigung. Hier können Scanner-Spiegel in Automatisierungssystemen z.B. am Ende eines Roboterarms verbaut werden, sodass dem Roboter zu jedem Zeitpunkt bewusst ist, was in seiner Umgebung passiert, welche Arbeitsschritte er zu erledigen hat und wie die Qualität seiner Arbeit ist.