
Aufgrund ihres nicht wertschöpfenden Charakters und des direkten Kontakts zum Werkstück weisen Handhabungsprozesse ein hohes Potenzial zur Effizienzsteigerung auf. Neben mechanischen Greifern stellen Vakuumgreifer eine weitverbreitete Lösung zur Durchführung von Handhabungsoperationen dar. Attraktiv für den Einsatz macht sie ihre Fähigkeit, sich an komplexe Oberflächen anzupassen. Das gilt insbesondere in Kombination mit einer elektrischen Vakuumerzeugung am Endeffektor, die eine externe Druckluft- bzw. Vakuumversorgung überflüssig macht. Die Dauer bis zum Aufbau der notwendigen Haltekraft sowie der Druckverlauf sind von verschiedenen Faktoren abhängig. Die Verwendung dieser Informationen zur Prozessverbesserung ist bisher kaum untersucht. Ein überwiegender Anteil der Handhabungsvorgänge findet zwischen einzelnen Fertigungsschritten eines Werkstücks, Bauteils oder einer Baugruppe statt. So werden auch Schritte zur Qualitäts- und Prozesskontrolle oft in separaten Stationen durchgeführt, wodurch weitere Handhabungsvorgänge notwendig werden. Deutlich effizienter wäre es, wenn der Greifer Funktionen zur Qualitäts- und Prozesskontrolle übernehmen würde und das Werkstück z.B. in der richtigen Orientierung oder bereits vorsortiert zur Weiterbearbeitung bereitstellt. Das wbk Institut für Produktionstechnik am Karlsruher Institut für Technologie (KIT) hat hierzu einen Ansatz entwickelt, der es ermöglicht, Werkstücke mit einem Vakuumgreifer auf Basis des im Sauggreifer entstehenden Unterdruckverlaufs zu klassifizieren. Methoden der künstlichen Intelligenz versprechen dabei eine autonome Datenauswertung der Werkstückoberfläche noch während der Handhabung.
Wissensextraktion aus dem Druckverlauf
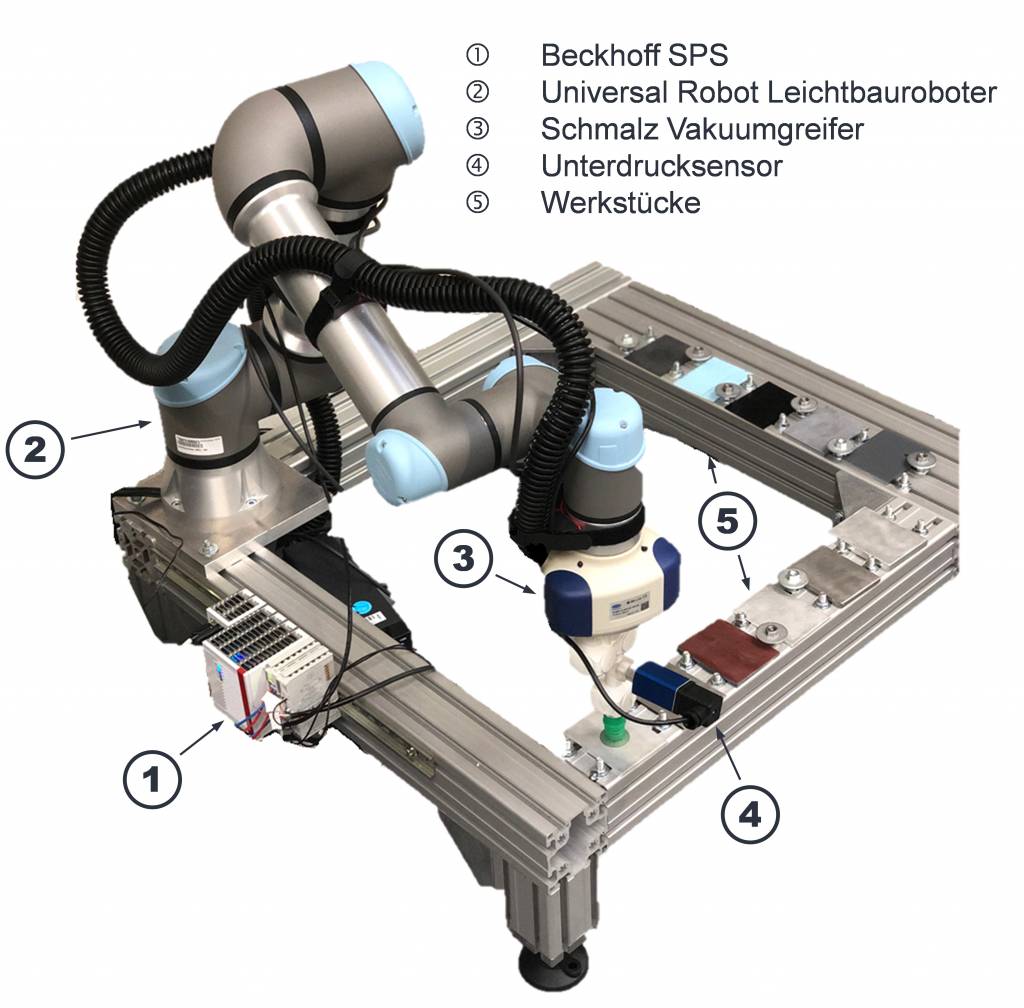
Um den Autonomiegrad von Handhabungssystemen zu erhöhen, muss aus erfassten Rohdaten zunächst prozessrelevantes Wissen extrahiert werden. In dem vom wbk entwickelten Ansatz handelt es sich um ein Greifsystem mit einem Sauggreifer, das anhand eines zusätzlichen Sensors den Druckverlauf während der Handhabung aufnimmt. Ein Greifvorgang wird durch Bewegung des Sauggreifers in axialer Richtung zum Werkstück realisiert. Sobald der gemessene Unterdruck einen vorgegebenen Wert unterschreitet, beginnt der Saugvorgang und Daten werden aufgenommen. Dementsprechend kann eine Unterdruck/Zeit-Korrelation aufgestellt werden. Um ein möglichst breites Spektrum an eingesetzten Werkstücken abzudecken, wurden Objekte mit unterschiedlichen Werkstoffen und Oberflächenrauheiten untersucht. Zu den Prüfobjekten zählen flächige Werkstücke aus Plexiglas, verschiedene weitere Kunststoffe sowie unterschiedliche Metalllegierungen. Bis auf einen Drucksensor bedarf es keiner weiteren Hardwarekomponente. Eine Auswertung über den Vergleich eindimensionaler Prozessmerkmale, wie dem mittleren erreichten Unterdruck, hat sich aufgrund statistischer Schwankungen als unzuverlässig erwiesen. Es bedarf daher eines Modells, das die Zusammenhänge zwischen Prozesseigenschaften und Unterdruckverlauf beschreibt. Maschinelle Lernverfahren als Problemlöser