
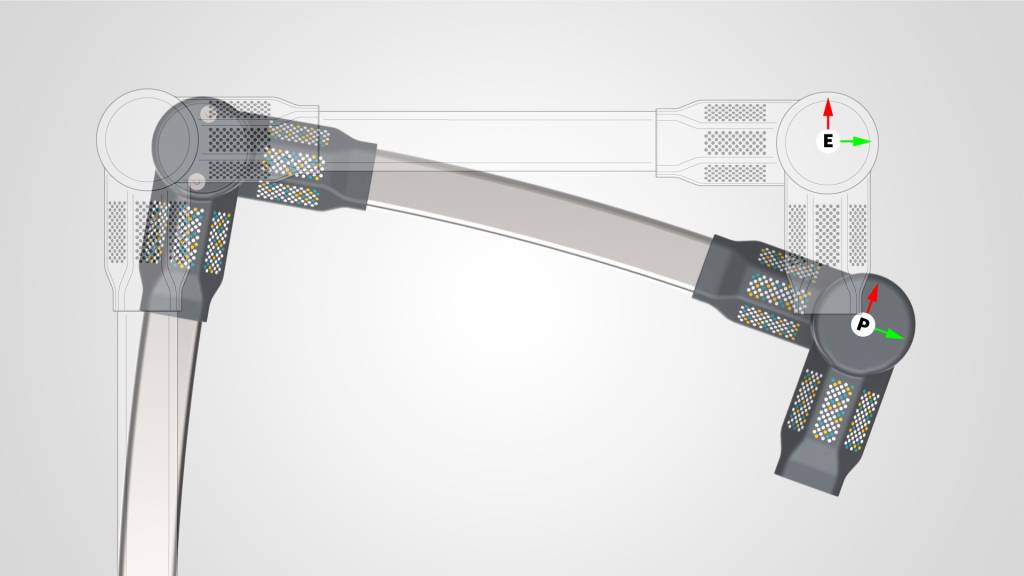
Visevi Robotics bietet mit ViseJoint einen bildverarbeitungsbasierten Drehgeber für allgemeine Winkelmessanwendungen ohne Sensoren am Robotergelenk an. Die Messung eines oder mehrerer Gelenke erfolgt mit Hilfe einer Vision-Software und einer Kamera, die die Gelenke betrachtet. Die Erfassung und Steuerung erfolgt rein kamerabasiert aus der Distanz. Mechanische Komponenten müssen also weder einen Sensor noch Elektronik oder Verkabelung integrieren. Das System ist als Softwarepaket für jeden Standard-PC und für viele Embedded-Systeme erhältlich. Es kann an die meisten Standardkameras (USB Vision, UVC, Ethernet) angeschlossen werden und liefert Winkelmessungen für alle beobachteten Gelenke. Der Benutzer muss lediglich texturierte Marker an diesen anbringen. Ein Entwicklungs-Kit, um sofort loszulegen, ist vorhanden. Zu den Anwendungen gehören mechanische Systeme mit einem oder mehreren Drehgelenken, die eine Kontrolle der Winkellage erfordern, sofern eine Beobachtung von außen möglich ist. Dazu gehören Automatisierungssysteme, bei denen mehrere Komponenten mit Rotationsachsen von einer einzigen Kamera überwacht werden können. Bei der Steuerung von Roboterarmen messen kamerabasierte Encoder-Ketten von mehreren Gelenken mit einem Markerpaar. Die Encoder können auch für Kalibrierungsaufgaben eingesetzt werden, z.B. zur Initialisierung eines relativen Encoders oder als zweiter Kanal in Verbindung mit bestehenden Encodern.