

Es gibt eine Reihe an Gründen, warum das automatisierte Entgraten mit Robotern unwirtschaftlich sein kann. Ist z.B. während des Entgratens nicht sichergestellt, dass wirklich alle Gratreste und auch Späne vom Werkstück beseitigt werden, können solche Rückstände die Qualität eines Produktes und auch weitere Bearbeitungsprozesse beeinträchtigen. Komplexe Bauteile mit hinterschnittenen Bohrungen erschweren ebenfalls ein automatisiertes Finishing, da solche Bereiche für einen Roboter nur schwer oder gar nicht erreichbar sind. Gegen eine Automatisierung sprechen zudem eine Produktion, die nicht auf Wiederholteile ausgelegt ist oder aber, wenn die Ausbildung der Grate innerhalb einer Produktserie stark variiert, etwa durch den Einsatz von Zerspanwerkzeugen bis an ihre Standzeitgrenzen.

Maschinelles Entgraten per Werkzeugmaschine oder manuell
Das maschinelle Entgraten mit einer Werkzeugmaschine bindet wertvolle Produktionskapazitäten, da die Maschine in dieser Zeit nicht für die eigentliche Fertigung zur Verfügung steht. Das manuelle Finishing wiederum ist nicht nur schmutzig, monoton und für die Mitarbeiter zumeist eine unergonomische Tätigkeit, sondern immer auch ein zusätzlicher Arbeitsschritt, der mit einem höheren Logistik-, Personal- und auch Zeitaufwand verbunden ist. Hinzu kommt außerdem, dass sowohl das manuelle als auch maschinelle Entgraten die Stückkosten in die Höhe treibt.
Voraussetzungen für robotergestütztes Entgraten
Die Investition in eine Roboterzelle für das automatisierte Entgraten, wie der Robotic Finishing Cell von Fastems, kann sich daher durchaus rentieren, insbesondere dann, wenn einige grundlegende Voraussetzungen erfüllt sind. So sollten während der Zerspanung sehr viele Teile mit Graten anfallen, die hinsichtlich ihrer Ausprägung ähnlich sind. Darüber hinaus müssen sich die Teile aufgrund ihrer Geometrie, Größe oder ihres Gewichtes besonders für das automatisierte Entgraten eignen, wobei sich der große Arbeitsbereich des Roboters insbesondere für das Finishing von größeren und schwereren Werkstücken anbietet.
Sind diese Voraussetzungen gegeben, birgt das robotergestützte Entgraten eine Fülle an Potenzialen: eine durchgängig hohe Teilequalität durch hohe Wiederholgenauigkeit, verringerte Rüst- und Durchlaufzeiten durch fertigungsparalleles Entgraten, geringere Stückkosten durch Verzicht auf maschinelles oder manuelles Finishing, höhere Fertigungskapazitäten durch Auslagerung von Entgratprozessen, mehr Flexibilität durch Ausführung weiterer Arbeiten mit dem Roboter (z.B. Werkstückmarkierung) und nicht zuletzt eine deutliche Entlastung der Mitarbeiter sowie einen höheren Arbeitsschutz.
Verfahren für die automatisierte Endbearbeitung
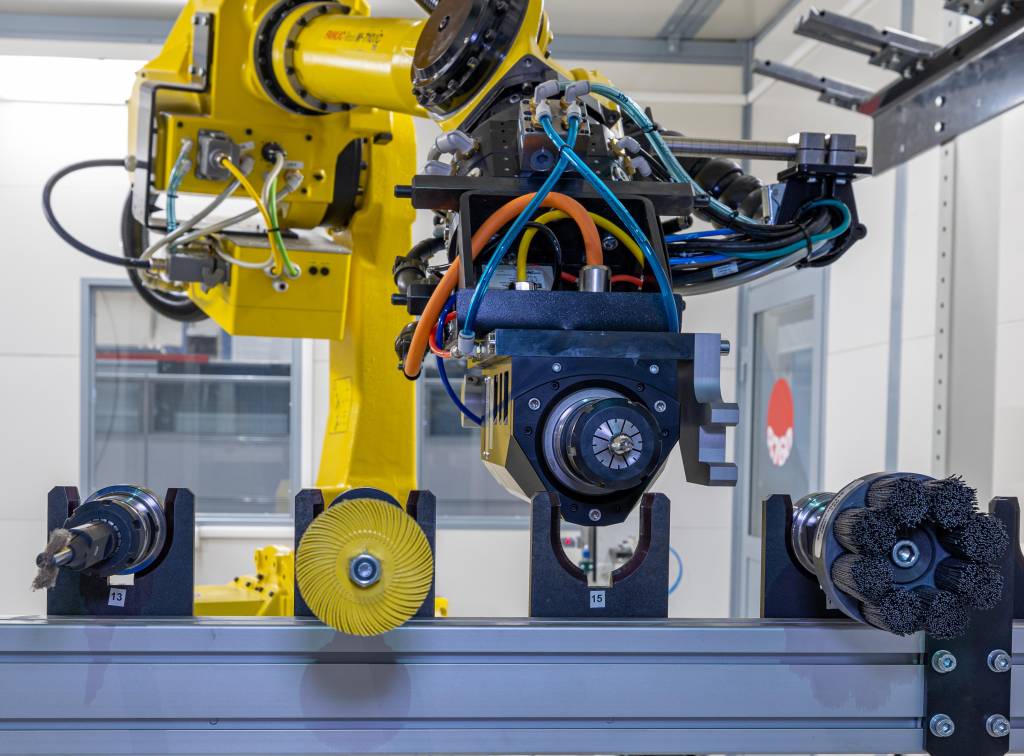
Für das automatisierte Finishing mit einem Roboter bieten sich im Grunde zwei Verfahren an: das werkstückgeführte (Part-to-Tool) und das werkzeuggeführte (Tool-to-Part) Entgraten. Beim Part-to-Tool-Prinzip handhabt der Roboter die Werkstücke und führt sie an die Entgratwerkzeuge. Entscheidendes Manko dieses Verfahrens: es kann nur mit einer festen Anzahl an Spindeln und somit limitierten Auswahl an Werkzeugen gearbeitet werden.