
Im Gegensatz zu den klassischen eisenlosen Motoren, resultiert eine Wicklung mit Eisenkern in einem höheren Magnetfluss und stärkeren Antrieben. Allerdings verlangsamt die hohe Induktivität aufgrund des Eisenkerns die Reaktion des Stroms. Bei großen Drehzahlen können sich Abweichungen vom einfachen linearen Verhalten der Motoren mit eisenloser Wicklung ergeben.
Elektrische Zeitkonstante und Kommutierung
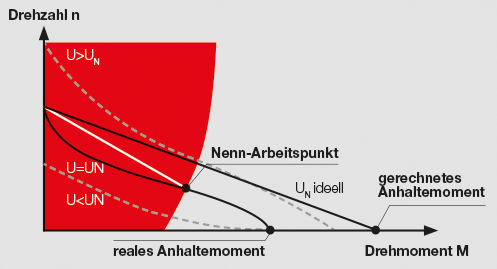
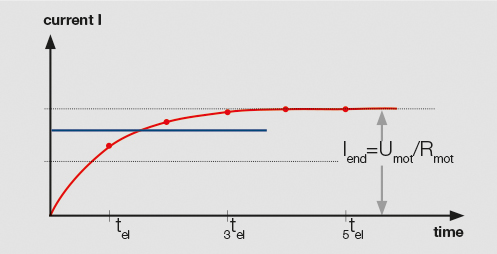
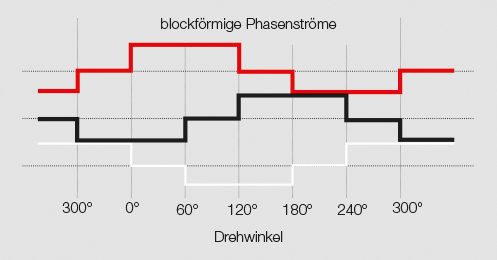
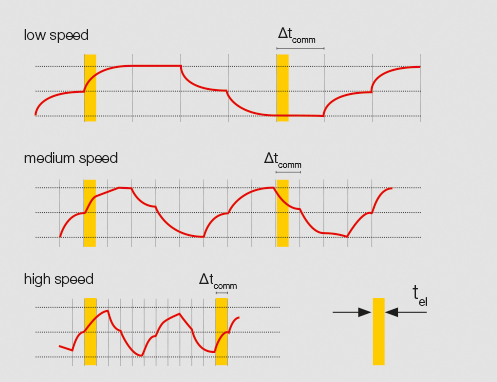
Die Motorwicklung stellt eine induktive und resistive Last dar, und der Motorstrom wird exponentiell gedämpft anwachsen, wenn eine Spannung angelegt wird. Das exponentielle Verhalten ist durch die elektrische Zeitkonstante charakterisiert, die sich einfach aus der Anschlussinduktivität geteilt durch den Anschlusswiderstand des Motors berechnet. Der maximale Strom am Ende ist durch das Ohmsche Gesetz gegeben. Bürstenlose Motoren werden elektronisch kommutiert, das heißt, der Strom in jeder Phase wird ein- und ausgeschaltet. Abbildung 3 zeigt den idealen Stromverlauf bei Blockkommutierung in den drei Phasen. Dies dient als Grundlage zur Spezifikation der Motoren bei Maxon. Die Induktivität bewirkt, dass der Wicklungsstrom nicht so abrupt ändern kann, wie es die Abbildung andeutet. Wie viel Zeit wird in jedem Kommutierungsintervall für den Stromanstieg benötigt? Berechnet man die Dauer eines solchen Intervalls und vergleicht diese mit der elektrischen Zeitkonstanten ist klar: je höher die Motordrehzahl, umso kürzer das Kommutierungsintervall. Zur Berechnung wird ein extremer Fall genommen, die Leerlauf-Drehzahl bei Nennspannung. Die Anzahl Kommutierungsintervalle pro Motorumdrehung entspricht sechsmal der Anzahl der Polpaare. Die Ergebnisse für verschiedene Motordesigns sind in der Tabelle zusammengefasst. Die ersten beiden Motoren in der Tabelle haben eine eisenlose Maxon-Wicklung mit tiefer Induktivität. Entsprechend sind die elektrischen Zeitkonstanten sehr kurz und – am wichtigsten – bedeutend kürzer als das Kommutierungsintervall. Somit kann sich der volle Strom in jedem Kommutierungsschritt ausbilden. Beim ECX-Speed-Motor ist die Situation nicht ganz so komfortabel wie beim Modell EC-max 40 aufgrund der besonders hohen Leerlauf-Drehzahl des Ersteren. Die letzten drei Motoren in der Tabelle sind Multipol-Motoren mit genuteten Wicklungen. Der Eisenkern erhöht die Induktivität und damit die elektrische Zeitkonstante auf Werte gegen 1ms. Andererseits werden die Kommutierungsintervalle sehr kurz wegen der hohen Anzahl Polpaare. Tatsächlich sind die Intervalle bedeutend kürzer als die elektrische Zeitkonstante. Daraus resultiert: Der Strom kann sich nicht voll ausbilden und der Motor wird schwächer. Der Effekt ist ähnlich wie eine Kommutierung, die nicht perfekt eingestellt ist und eine höhere Leerlauf-Drehzahl sowie eine steilere Kennlinie ergibt. Das ist in Abbildung 1 durch die gestrichelten Linien im roten Dauerbetriebsbereich dargestellt. All diese Phänomene sind bei höheren Drehzahlen ausgeprägter, das heißt nahe bei Leerlauf und bei höherer Versorgungsspannung.
Praktische Aspekte
Im Maxon-Katalog werden drei Punkte auf der Drehzahl/Drehmoment-Kennlinie spezifiziert: Leerlauf, Nennarbeitspunkt und Anlauf. Diese Arbeitspunkte werden unter Berücksichtigung der bisher beschriebenen Effekte berechnet. Wir haben gesehen, dass die größten Abweichungen auftreten, wenn die Intervalle bei Blockkommutierung sehr kurz werden, also bei hohen Motordrehzahlen. Typisch wird somit die Leerlauf-Drehzahl am stärksten beeinflusst und gegen höhere Werte verschoben. Bei der Angabe der Drehzahl/Drehmoment-Kennlinie und ihrer Steigung wird eine gerade Linie zwischen Leerlauf-Drehzahl (welche zu hoch ist) und Anhaltemoment angenommen. Somit wird der Nennarbeitspunkt unterhalb dieser Linie zu liegen kommen (vgl. Abbildung 1 und 4). In den meisten praktischen Anwendungen und für die Motorauswahl lässt sich die im Katalog aufgeführte Regel anwenden: „Bei den Flachmotoren ist vor allem der Dauerbetrieb interessant. Dort kann die Kennlinie durch eine Gerade zwischen der Leerlauf-Drehzahl und dem Nennarbeitspunkt angenähert werden.“ Berechnet man das Beispiel für den Motor EC-i 40 High Torque mit 50W, erhält man eine Kennliniensteigung, die bedeutend höher ist als der Katalogwert. Als Konsequenz bräuchte man etwa 32V Spannung, um 5.000U/min bei 100mNm zu erreichen, anstelle der 27V, wenn der ideelle Katalogwert der Kennliniensteigung gelten würde.
Was man daraus lernen kann
Vorsicht bei der Auslegung von Motoren mit genuteten Wicklungen für hohe Drehzahlen. Sie könnten mehr Spannung benötigen als gedacht. Bei tiefen Drehzahlen kann man problemlos die spezifizierten Motordaten verwenden. Zusatzbemerkung: Bei Sinus-Kommutierung (FOC oder feldorientierte Regelung) dürfte die hohe Induktivität einen viel kleineren Einfluss haben, da der Strom graduell verändert wird und nicht so abrupt wie bei Blockkommutierung.