
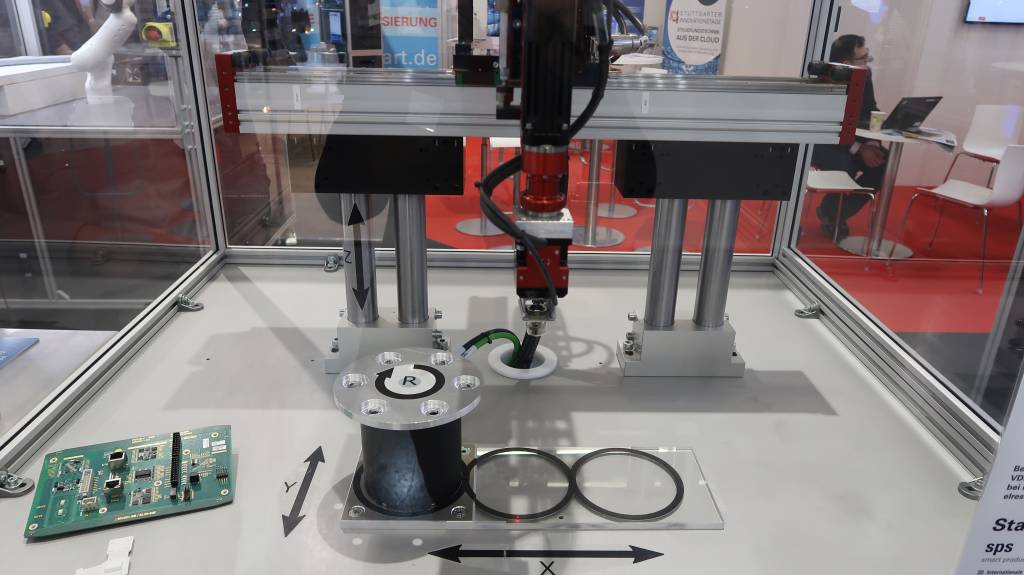
In einer immer wandlungsfähigeren Produktion müssen Fertigungsprozesse auf schnelle Produktlebenszyklen flexibel reagieren können. Ein Fokus im Sinne von Industrie 4.0 liegt deshalb darauf, rekonfigurierbare Automatisierungsstationen für den Produktionsablauf zu gestalten. Dadurch kann flexibel auf veränderte Produktionsanforderungen eingegangen und die Station je nach Bedarf angepasst, grundlegend verändert oder neu aufgebaut werden. Diese Motivation begründet das Forschungsprojekt Devekos (Durchgängiges Engineering für sichere, verteilte und kommunizierende Mehrkomponentensysteme) des BMWi. In dessen Rahmen werden Automatisierungskomponenten entwickelt, die mit in die Komponente integrierter Miniatursteuerung flexibel miteinander kombiniert werden können. Dabei wird auf zentralen Koordinations- und Recheneinheiten verzichtet. Stattdessen werden die Miniatursteuerungen selbst mit der Planung und Durchführung des Prozesses betraut. Eine besondere Herausforderung bei der Umsetzung von Produktionsprozessen mit dezentralen Steuerungen ist die bahngenaue Bewegung von mehreren positionierenden Komponenten. Hier zeigte das ISW auf der Fachmesse SPS 2019 einen Demonstrator, der über ein dezentrales Ansteuerkonzept bahntreu im Raum verfährt. Auch bei Änderungen im System zu Laufzeit, etwa der Veränderung der verfügbaren Geschwindigkeit von einzelnen Achsen, stellt dieses Ansteuerkonzept sicher, dass der Gesamtverbund aller an der Bewegung beteiligten Achsen sich mit möglichst geringer Bahnabweichung bewegt.
Verteilte Interpolation
Das dezentrale Ansteuerkonzept wurde nach Vorbild von natürlichen Schwärmen und Interaktionskonzepten von Multiagentensystemen entwickelt. Für die Umsetzung ist die Bahn im Raum mit beliebig vielen linearen Segmenten definiert. Jede Achse erhält die Information über die geplante Raumbahn und berechnet über die Miniatursteuerung sowie den abgelegten Transformationen die daraus resultierenden Achsbewegungen, also ihre Beteiligung an der Bahnkurve. Da die Achse ebenfalls Kenntnis über die ihr zur Verfügung stehende Achsdynamik, also maximalen Beschleunigungen, Geschwindigkeiten und Positionen besitzt, kann eine Vorplanung durchgeführt werden. Das Ergebnis der Vorplanung ergibt Zeitbedarfe für jedes lineare Segment entlang der Bahn. Um bei sich für mehrere Achsen unterscheidenden geplanten Zeiten für ein Segment trotzdem eine Synchronisierung der Bewegung zu erreichen, werden die Planzeiten aller beteiligten Achsen über das Produktionsnetzwerk ausgetauscht und eine gemeinsame Konsenszeit über das Maximum bestimmt. Dieser Konsens bedeutet, dass immer mindestens eine Achse im Segment ihre maximale Dynamik ausnützt, während die weiteren Achsen ihre Dynamik und Verfahrgeschwindigkeit so drosseln, dass weiterhin eine gute Bahntreue erreicht wird. Dafür werden in der Miniatursteuerung sogenannte Segmentregler implementiert, die in der Lage sind, die Achssollwerte so vorzusteuern, dass eine Achse die Zielposition jedes Segments genau in der vorgesehenen Konsenszeit erreicht. Dieses Konzept wurde bisher mithilfe einer Simulation validiert und an kommerziellen Achsen erprobt.
Übertragung auf Miniatursteuerung
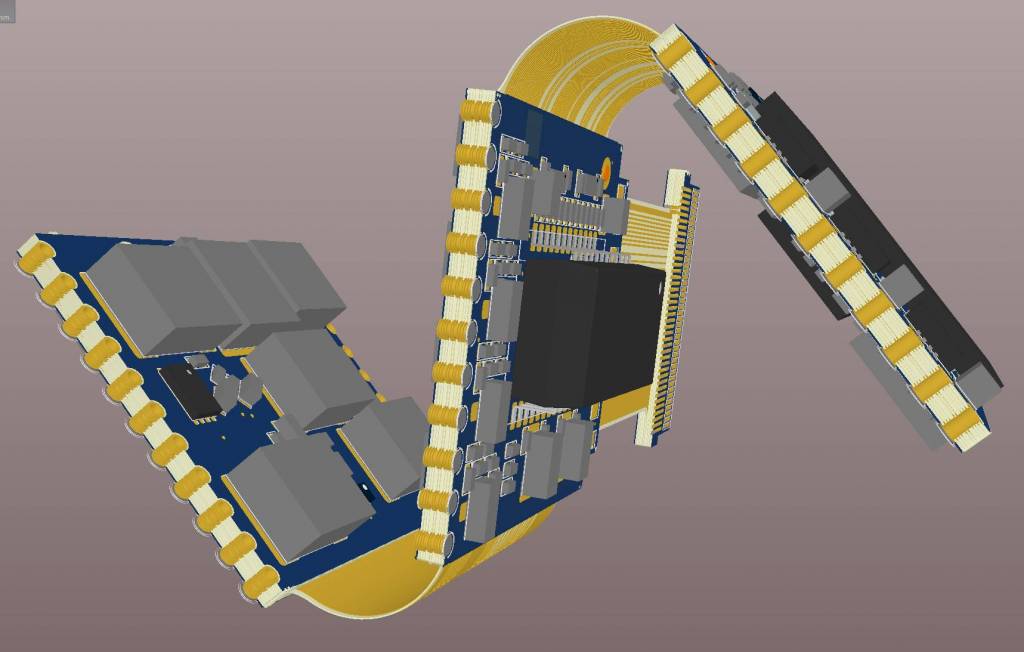
Die prototypische Miniatursteuerung findet auf einer dreiteiligen Platine Platz, die über Flexprint gefaltet werden kann, sodass sie direkt in der Umhausung der Automatisierungskomponenten verbaut werden kann. Ein Bauraum von 2,5cm³ ist ausreichend. Dabei beinhaltet die Miniatursteuerung die Umsetzung des Kommunikations-Stacks über Ethernet (RJ45), die Antriebselektronik zur Ansteuerung von positionierenden Komponenten sowie ein FPGA für logische Berechnungen und Umsetzung der Steuerung. Die limitierende Rechenkapazität des verbauten MAX10 FPGA mit NIOS II CPU begrenzt die mögliche Komplexität des dezentralen Lösungsansatzes, da das Konzept später auf diese und ähnliche Miniatursteuerungen ohne Einbußen übertragen werden muss. Das verwendete Kommunikationsprotokoll für die dezentrale Synchronisierung der Achsen wurde prototypisch implementiert und basiert in weiten Teilen auf einem internen Zustandsautomaten jeder Achse, deren Zustände über das Netzwerk kommuniziert werden. Bei der Bewegungsplanung werden dem Telegramm die Sollpositionsdaten der Bahn, bzw. die individuell berechneten Planzeiten der Achsen angehängt. Sollte während der Ausführung der Bahn keine Neuberechnung der Durchführung notwendig werden, reduziert sich die Kommunikation auf reinen Statusaustausch und spart dadurch unnötige Netzwerklast. Die Planung der Bewegung selbst wird ebenfalls durch eine vereinfachte Annahme einer mittleren Geschwindigkeit über das Gesamtsegment approximiert, sodass die Berechnungskomplexität gering bleibt.
Validierung der korrekten Funktion
Die Umsetzung der dezentralen Steuerungslogik wurde über die Kopplung der Miniatursteuerung zu einem simulierten Versuchsstand mit vier weiteren Achsen validiert. Die Miniatursteuerung verantwortet in diesem Fall die Bewegung eines virtuellen Förderbands, das parallel zu einem Portalsystem verfahren soll. Die Kopplung zwischen Simulation und Evaluations-Board mit Miniatursteuerung wurde über UDP umgesetzt, sodass Zustände und Datenprotokolle anhand des oben beschriebenen Nachrichtenformats versendet werden können. Der Zustandsautomat wurde in Embedded C innerhalb der NIOS-II-Umgebung umgesetzt. Die Verwendung der hardwarenahen Miniatursteuerung ermöglicht im Gegensatz zu kommerziellen Antriebsverstärkern die Umsetzung des Segmentreglers als ein spezielles Ansteuer- und Regelkonzept. Hierdurch können die über das Kommunikationsprotokoll vereinbarten Konsenszeiten tatsächlich als Vorgabe für die Achsbewegung an die Antriebselektronik umgesetzt werden.