
Dutch Wind Tunnels (DNW) ist einer der führenden Windkanal-Dienstleister der Welt und wurde vom Deutschen Zentrum für Luft- und Raumfahrt (DLR) und dem Königlichen Niederländischen Luft- und Raumfahrtzentrum (NLR) gegründet. Unter anderem werden dort Flugzeug-, Fahrzeug-, Gebäude- oder andere Festkörpermodelle in einen Luftstrom mit bekannter Geschwindigkeit positioniert. Dabei wird auch beim In-Ground Effekt der Boden unter dem zu prüfenden Objekt mit einem integrierten beweglichen Bandsystem simuliert. Das Moving Belt (Rolling Road) System ist ein 7,9×9,6m großes Stahlband, das in den Windkanalboden integriert ist. Es bewegt sich synchron mit der Luft bis zu Windgeschwindigkeiten von 80m/s.

Stereoskopisches Punktverfolgungssystem
Eine Schlüsselfunktion für das DNW ist die Gewinnung möglichst vieler hochwertiger Daten aus einem Windkanaltest. Unter den Windlasten, die vom Start bis zur Landung auftreten, verformen sich Flugzeugteile, was zu einer Biegung und Verwindung des Flügels führt. Ein vom DNW entwickeltes stereoskopisches Punktverfolgungssystem misst solche Modellverformungen durch die Verfolgung von Markern aus verschiedenen Winkeln während des Tests. Eine aktuelle Anwendung ist das von der EU finanzierte Uhura-Projekt. Ziel ist die Entwicklung numerischer Werkzeuge für instationäre Hochauftriebs-Aerodynamik. Beispielsweise soll die Krueger-Klappe Laminarflügeltechnologien ermöglichen und gilt als wichtigste Quelle zur Verringerung des Luftwiderstands. Mit Messungen in DNW-Windkanälen verfügt Uhura über einen einzigartigen Datensatz für die Validierung neuer Modelle der numerischen Strömungsmechanik (CFD). Mit detaillierten Strömungsmessungen aus der Particle Image Velocimetry (PIV) und Modell Deformationsmessungen können die Wechselwirkungen zwischen dem Fluid und der Flügelstruktur untersucht werden. Die Ergebnisse fließen in Vorhersagen des Verhaltens und Optimierung des Designs von Hochauftriebsvorrichtungen für Transportflugzeugsysteme ein.

Kabellängen bis 10km
Je nach Tests verwendet das DNW zwei oder vier 10GigE 20MP HR-20000 Kameras von Emergent Vision Technologies, um die Windkanalmodelle zu überwachen. Bei voller Auflösung von 5.120x3.840 erreicht die Kamera 32fps und bietet eine Multi-Kamera-Synchronisation mit <1µs und geringen CPU-Overhead. Die Stereokamera-Einrichtung erfordert, dass die vier Kameras im Windkanal Bilder der Marker aus verschiedenen Blickwinkeln aufnehmen. Laut Gerrit Feenstra, Instrumentierungsingenieur bei DNW, wurden die HR-20000-Kameras aufgrund ihres Preis-/Leistungsverhältnisses und ihrer Glasfaserschnittstelle ausgewählt, die Kabellängen bis zu 10km ohne Glasfaserkonverter oder Repeater ermöglicht. "Bevor Emergent seine 10GigE-Ethernet-Glasfaserschnittstelle auf den Markt brachte, hatten wir komplizierte Testaufbauten. Die begrenzte Kabellänge von zwei bis drei Metern zwischen Kamera und Computer bedeutete, dass wir für die Stereobildsysteme zwei PCs innerhalb des Windkanals verwenden mussten", erklärt Feenstra. "Die optische Schnittstelle von Emergent ist ideal, da wir jetzt alle vier Kameras auf einem einzigen PC laufen lassen können, der außerhalb des Windkanals aufgestellt ist."
3D-Verformungsmessungen
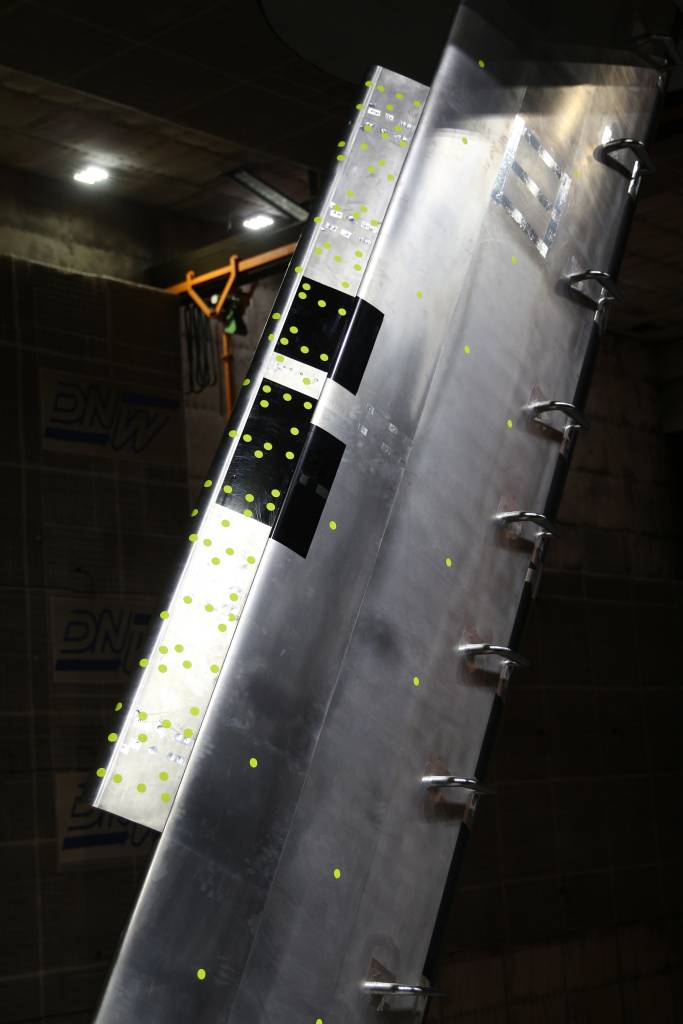
Basierend auf der Verfolgung der 3D-Koordinaten von Markern, wurde das Stereo-Punktverfolgungsmessverfahren erfolgreich in Projekten eingesetzt. Bei diesen Experimenten wird ein Markierungsraster mit bekannten Koordinaten auf das zu testende Objekt aufgebracht. Bei den Markern kann es sich entweder um aktiv gesteuerte Lichtquellen oder um passive fluoreszierende Klebe- oder Sprühmarker handeln. Während der Modellverformungstests im Rahmen des Uhura-Projekts nimmt die Emergent-Kamera Videoaufnahmen von passiven fluoreszierenden Markern auf, die auf einem Modell des Flügels und der Krueger-Vorrichtung angeordnet sind. Die hochpräzisen 3D-Markerpositionen, die mit einer speziellen Bildanalysesoftware ermittelt wurden, dienen als Eingabe für die Kalibrierungssoftware, die eine Korrelation zwischen den 2D-Bildebenen der Digitalkamera und dem Messvolumen des Modells erreichen. Eine weitere Bildanalyse bestimmt die geometrischen Eigenschaften des Modells, wie zum Beispiel die genaue Lage, Position, Biege- und Verwindungsverteilung. Die Flügelverformung wird durch die Modellierung einer 3D-Oberflächengeometrie auf der Grundlage einzelner Markierungsgitterpunkte mit finiten Elementen erreicht. Die ermittleten Daten werden dabei in Echtzeit (bis zu 500Hz) übermittelt. Die räumliche Auflösung des Systems hängt von Kameratyp, Objektivsystem, Modelllänge Maßstab und Markierungskonfiguration ab. Auflösungen bis zu einem Zehntel eines Pixels sind möglich. Die Koordinatenauflösungen sind abhängig von der Größe des Kamerachips und der Modellgröße (Größenordnung der Größenordnung 1/(10*R), wobei R die Anzahl der Pixel pro abgebildetem Meter ist). Für ein typischen Windkanalmodell über die gesamte Spannweite beträgt die Genauigkeit der Koordinatenerkennung etwa 0,5‰ der Sehnenlänge für die Flügelverschiebung und 0,1° für die Flügelverwindung (Torsion).