
Das größte Potenzial von VR in KMU stellt eine realitätsnahe Interaktion mit der virtuellen Maschine dar. Bediener können die Programmierung neuartiger Anlagen gefahrlos an einem virtuellen Maschinenabbild üben und sich so mit den verschiedenen in der Roboterzelle implementierten Prozessen vertraut machen. Während auch erfahrene Roboter-Bediener diese Möglichkeit nutzen können, profitieren vor allem neue Bediener davon, den Einlernprozess gefahrlos am virtuellen Modell durchführen zu können. Durch optimierte Einlernverfahren, die in ihrer Struktur an ein Videospiel erinnern, können neue Bediener effizienter an neuen Anlagen eingelernt werden. Sowohl die reellen Maschinen als auch das Personal, das zuvor das Einlernen neuer Kollegen übernommen hat, können so weitestgehend Teil der wertschöpfenden Produktion bleiben. Im Rahmen von SiRoWo entwickelt das Konsortium aus Forschungseinrichtungen, Softwareunternehmen und Endanwendern eine VR-basierte Prozesssimulation zur Unterstützung der Anlagenprogrammierung samt Einlernprogramm. Beides soll dann auf einem VR-Headset mit den dazu gehörenden Controllern in der Praxis validiert werden.
Erweiterte Realität
Da bei AR der Nutzer immer noch einen Großteil seiner Umgebung wahrnehmen kann, eignet sich AR vor allem für die Integration von Unterstützungsprozessen in das Werkstattumfeld. Während sich die verschiedenen Geräte für den Einsatz von VR nur gering voneinander unterscheiden, existiert eine Vielzahl verschiedener Möglichkeiten, AR umzusetzen.
Brillen, bei denen generierte Grafiken auf eine transparente, direkt vor den Augen angebrachte Scheibe projiziert werden, schränken den Handwerker in seiner Umgebungswahrnehmung kaum eine und ermöglichen es, während der Benutzung beide Hände für andere Tätigkeiten einzusetzen. Wird hingegen bei einer Brille die Umgebung von einer Kamera erfasst und auf konventionellen Bildschirmelementen wiedergegeben, kann es durch geringe zeitliche Verzögerungen und ungewohnte Blickwinkel zur Beeinträchtigung der Umgebungswahrnehmung kommen.
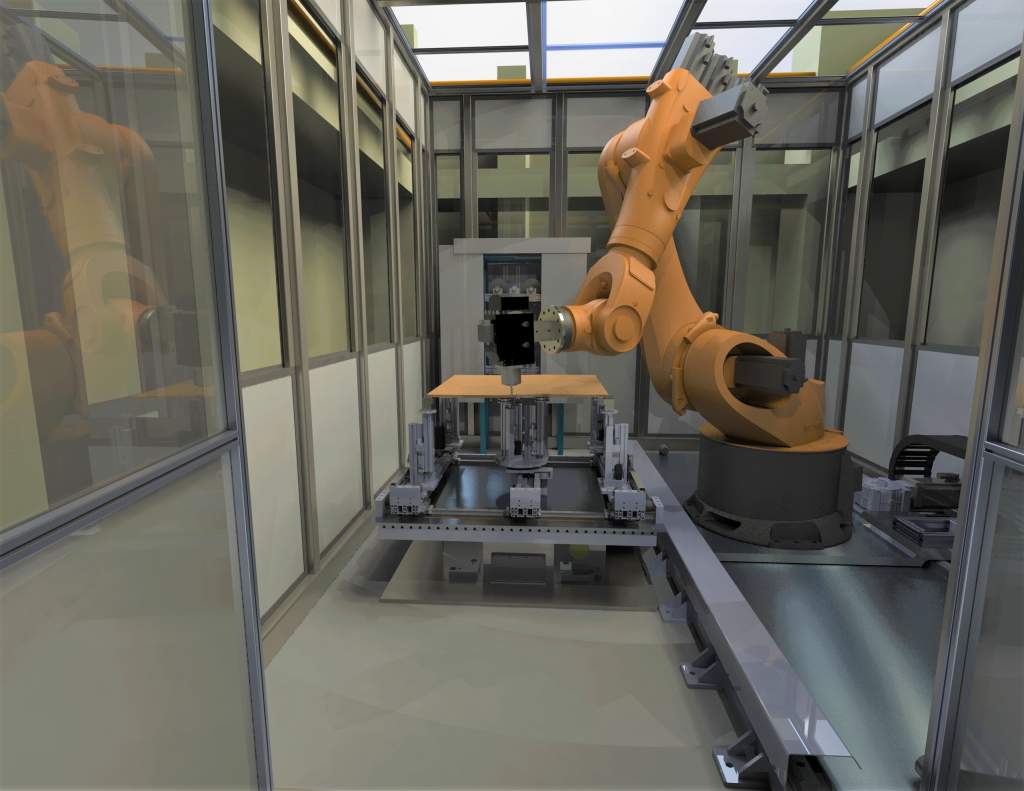
Um diese Nachteile auszugleichen, können Tablets eingesetzt werden, die durch eine Trackingfunktion im Raum ihre eigene Position ermitteln und so je nach Situation verschiedene Dienste anzeigen. Zwar wird der Bediener hierbei durch das Halten des Tablets in seinen möglichen Tätigkeiten eingeschränkt, er kann sich durch seine nicht beeinflusste Umgebungswahrnehmung jedoch frei bewegen und somit gut in das Werkstattumfeld integrieren. Dieser Ansatz wird auch in SiRoWo verfolgt. Ein auf den Endeffektor des Roboters gerichtetes Tablet zeigt sowohl die nächsten Bearbeitungsschritte als auch aktuelle Bearbeitungsparameter als Overlay der Kameraaufnahme an. Dadurch können Bediener stets unabhängig vom eigenen Standort die Bauteilbearbeitung verfolgen.
Integration in den Betrieb
Will ein Betrieb moderne AR- oder VR-Technologien einsetzen, können bereits vorhandene Prozesse der IT-Landschaft dieses Bestreben unterstützen. Vor allem ein durchgängiges Datenmanagement, das alle Prozesse eines KMU-Betriebs umfasst, ist sinnvoll. Hiermit kann sichergestellt werden, dass VR- und AR-Anwendungen stets die korrekten Daten zur Verfügung stehen und somit in Simulationen und Visualisierungen der Realität entsprechen. Ein solches Verwaltungssystem wird vom Projektpartner Exapt Systemtechnik zur Verfügung gestellt und kommt auch in der entwickelten Roboterzelle im Rahmen des Forschungsprojekts zum Einsatz.
Auch für Visualisierungen kann auf bereits existierende Softwarekomponenten, wie etwa Simulationen des Materialabtrags, zurückgegriffen werden. Hier werden vom Projektpartner ModuleWorks solche für CAM-Programme entwickelte Komponenten zur Verfügung gestellt und im Rahmen des Forschungsprojekts untersucht, inwiefern durch VR und AR der Zugang zu solchen Simulationen im Bereich der Bearbeitungsrobotik im Handwerk verbessert werden kann.
Hinweis zur Förderung
Das Forschungsvorhaben, das diesem Bericht zugrunde liegt, wird mit Mitteln des Bundesministeriums für Bildung und Forschung unter dem Förderkennzeichen 03VNE2100l gefördert. Die Verantwortung für den Inhalt dieser Veröffentlichung liegt bei den Autoren.