
Pro Bewegung ein Antrieb: Das ist der klassische Aufbau von Positioniersystemen. Sollen mehrere Bewegungen ausgeführt werden – beispielsweise in X-, Y- und Z-Richtung – werden einfach mehrere Linearachsen bzw. -tische übereinandergestapelt. Bis zu einem gewissen Punkt funktioniert das hervorragend. Kritisch wird es, wenn sehr viele Freiheitsgrade im Spiel sind. Denn dann wird der Stapel aus Achsen und Tischen relativ hoch – und damit im oberen Bereich instabil. Außerdem steigen Platzbedarf, Gewicht und Kosten schnell in schwindelerregende Höhen. Abhilfe schaffen parallelkinematische Konzepte.
Bei Parallelkinematiken erfolgt das Zustellen einer Bewegung mittels mehrerer Antriebe, die parallel zur gleichen Zeit arbeiten. Das klingt erst einmal komplex, bietet aber entscheidende Vorteile – vor allem hinsichtlich Präzision und Bauraum, wie Dr. Alexander Bromme, Geschäftsführer von Steinmeyer Mechatronik, erklärt: „Parallelkinematische Positioniersysteme sind deutlich kompakter und steifer als klassische Konstruktionen, bei denen jeder einzelne Freiheitsgrad mit einem separaten Antrieb realisiert wird. Dadurch können sie präziser positionieren und kommen mit weniger Bauraum aus.“ Insbesondere Anwendungen mit kleinen Verfahrwegen, hohen Genauigkeiten und vielen zu verstellenden Achsen profitieren von diesem Konzept.

Individuell und hochgenau positionieren
Beim Begriff Parallelkinematik erscheint den meisten wahrscheinlich ein Hexapod vor dem inneren Auge. Das verwundert nicht, schließlich sind die Sechsbeiner ein Klassiker und werden häufig eingesetzt. Eine Patentlösung sind sie dennoch nicht. Größtes Manko: Sie haben sechs Freiheitsgrade – und zwar immer. Eine kundenindividuelle Anpassung der Freiheitsgrade ist bei Hexapoden nicht möglich. Was also tun, wenn die Anwendung diese sechs Freiheitsgrade gar nicht benötigt? Hilfreich ist ein Blick über den Tellerrand in Richtung Steinmeyer Mechatronik. Das Dresdner Unternehmen gehört zu den weltweit führenden Herstellern von hochgenauen Positionierlösungen für optische und feinmechanische Systeme und hat sich insbesondere als Spezialist für individuelle Sonderanfertigungen einen Namen gemacht. Das Credo: Das Unmögliche möglich machen und die Grenzen des Machbaren neu definieren. Parallelkinematiken bilden da keine Ausnahme. Gemeinsam mit dem Kunden entwickelt der Positionierspezialist innovative, auf die jeweilige Anwendung perfekt zugeschnittene Lösungen.
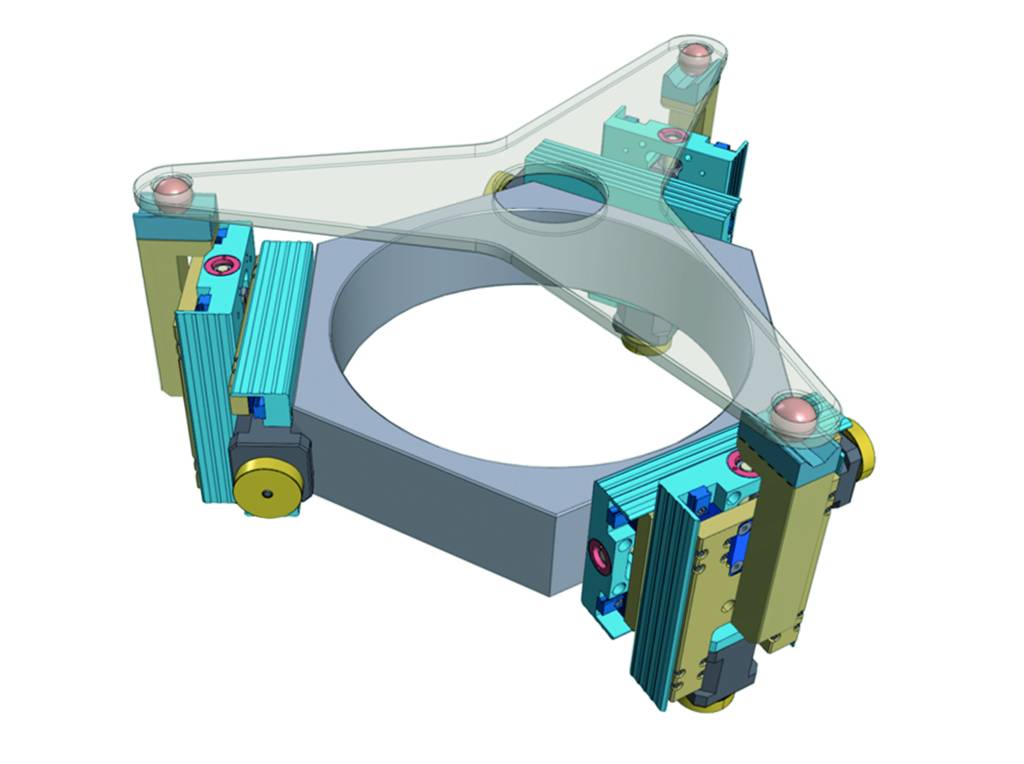
Kinematische Kopplungen nach der Maxwell-Anordnung
Die parallelkinematischen Positioniersysteme von Steinmeyer Mechatronik basieren auf dem Prinzip kinematischer Kopplungen nach der Maxwell-Anordnung, das auch bei den Tastköpfen in der 3D-Koordinatenmesstechnik zum Einsatz kommt. Die Maxwell-Anordnung besteht aus drei Kugeln in je einem Prisma bzw. einer V-Nut, die auf einen zentralen Schnittpunkt ausgerichtet sind. Dank der symmetrischen Anordnung ist thermische Stabilität gegeben. „Jedes Prisma bindet zwei Freiheitsgrade. Insgesamt sind also genau sechs Freiheitsgrade gebunden. Damit ist die Maxwell-Anordnung statisch bestimmt“, so Dr. Bromme und erläutert: „Ein System ist statisch bestimmt, wenn die Anzahl der Lagerreaktionen gleich der Anzahl der möglichen Bewegungsrichtungen, sprich Freiheitsgrade, ist und jeder Bewegungsrichtung nur eine Lagerreaktion entgegenwirkt“. Für den Aufbau von Parallelkinematiken ist statische Bestimmtheit elementar, denn nur statisch bestimmte Systeme sind unbeweglich bzw. nicht verschiebbar – eine Grundvoraussetzung für eine präzise Positionierung.
Je nach Applikation setzt Steinmeyer Mechatronik bei den Parallelkinematiken DC-, AC-, Schritt-, Linear- oder Piezomotoren ein. Die kinematischen Entkopplungen können über klassische Gelenke, Festkörpergelenke, Dreh- und Linearführungen oder Luftlager erfolgen. Auch Lösungen für anspruchsvolle Umgebungen wie Hochvakuum, Ultra-Hochvakuum und für nichtmagnetische Baugruppen lassen sich wirtschaftlich umsetzen.
Breites Einsatzspektrum
Parallelkinematische Positioniersysteme sind präzise, dynamisch und kompakt – und damit eine Idealbesetzung für Justage- und Alignment-Aufgaben in der Messtechnik und Mikromontage. Besonders oft werden sie in der Optik-Montage eingesetzt. Ein Beispiel ist das Ausrichten von Linsen zum Verkitten oder Kleben in ihre Fassung. „Linsen werden hochpräzise gefertigt, die Anforderungen an die Fassung dagegen sind vergleichsweise gering. Alignment-Systeme mit paralleler Kinematik können die Linse in mehreren Freiheitsgraden auf den Mikrometer genau ausrichten und stellen einen perfekten Sitz sicher“, erläutert Dr. Bromme. Auch bei der Verlegung von Glasfaserkabeln sind parallelkinematische Positioniersysteme unerlässlich. Werden die einzelnen Glasfasern mit einem Durchmesser von nur einem Zehntel Millimeter an den Enden verbunden, müssen sie exakt zueinander ausgerichtet sein. Dafür werden sie nicht nur in X, Y und Z, sondern auch im Winkel perfekt positioniert. Ansonsten ist Datenverlust vorprogrammiert.