
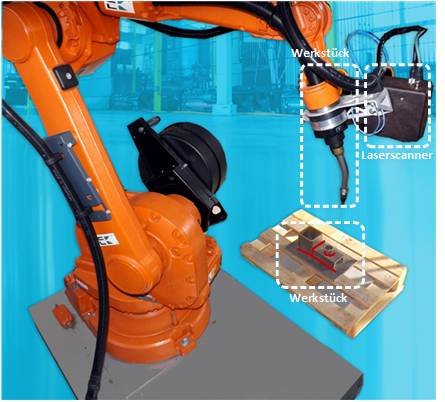
Um den zusätzlichen Zeitaufwand für die Programmierung in der Kleinserienfertigung zu reduzieren, befasst sich das Forschungsprojekt ‚Kamerabasierte Bahnplanung für Industrieroboter‘ mit der Entwicklung einer Planungssoftware, die automatisch kollisionsfreie Roboterbahnen innerhalb vorgegebener Randbedingungen plant und Abweichungen des realen Bauteils ausgleicht. Für die automatische Planung müssen die Umgebung des Roboters, einschließlich des Werkstücks, und die Robotergeometrie bekannt sein. Zu diesem Zweck wird ein Laserscanner am Flansch des Roboters angebracht. Der Sensor tastet das Werkstück vor jeder Bahnplanung ab und nimmt eine 3D-Punktwolke der Szene auf. Für jedes neue Werkstück wird eine Bahnplanungsanforderung an den Bahnplaner gesendet. Hierbei können bestimmte Toleranzbereiche für jede programmierte Pose definiert werden. Diese Toleranzen werden durch den Bahnplaner zur Vermeidung von Kollisionen genutzt. Verschiedene Reduktionsmechanismen wie ein multiauflösendes Umgebungsmodell und eine Heuristik-basierte Schrittweitensteuerung sorgen für kurze Planungszeiten.
Erkennung und Kompensation von Abweichungen
Grundlage für die Planungssoftware ist ein 3D-Modell des zu bearbeitenden Werkstücks. Auf der Grundlage dieses Modells wird durch ein Matching-Verfahren die genaue Orientierung und Position des Werkstücks im Roboterkoordinatensystem bestimmt. Die Bahnplanungsanforderung kann so an die tatsächliche Position des Werkstücks vor dem Roboter angepasst werden. Verformungen des Werkstücks im Vergleich zum 3D-Modell werden erkannt und kompensiert. Basierend auf dem Verformungsmodell kann die Bahn entweder entsprechend angepasst oder das Werkstück bei zu großer Abweichung als Ausschuss erkannt werden. Das Punktwolkenmodell wird für die Planung der Roboterbahn in eine Voxelkarte transformiert. Damit kann die Kollisionsberechnung zuverlässig und schnell durchgeführt werden. Basierend auf der Karte wird ein kollisionsfreier Weg berechnet. In einem zweiten Schritt wird die gefundene Bahn geglättet und eine Trajektorie geplant. Mit einer vorhandenen Schnittstelle zu Kuka, ABB und ROS kann die Bahn direkt an das Leitsystem übergeben und ausgeführt werden.
Einfache Vorbereitung neuer Roboteraufgaben
Mit Hilfe der entwickelten Lösung zur kamerabasierten Bahnplanung wird der notwendige Zeitaufwand für die Planung und Vorbereitung einer Roboteraufgabe erheblich reduziert. Neben der CAD-basierten Programmierung kann die Bahn auch direkt am Werkstück vorgegeben werden. Hierzu wurde eine Lösung entwickelt, die die Bahnprogrammierung durch ein Zeigegerät direkt am physikalischen Werkstück ermöglicht. Eine manuelle Programmierung ist nicht mehr notwendig. Stattdessen wird die initiale Bearbeitungsbahn auf Basis von Kameradaten automatisch geplant und ausgeführt. Das macht den Einsatz von Industrierobotern auch bei Kleinserien und Einzelteilfertigung wirtschaftlich. Das Forschungsprojekt KaBa wird im Rahmen des Zentralen Programms Innovation Mittelstand (ZIM) vom Bundesministerium für Wirtschaft und Energie (BMWI) gefördert.