
Einschätzung der Ergebnisse
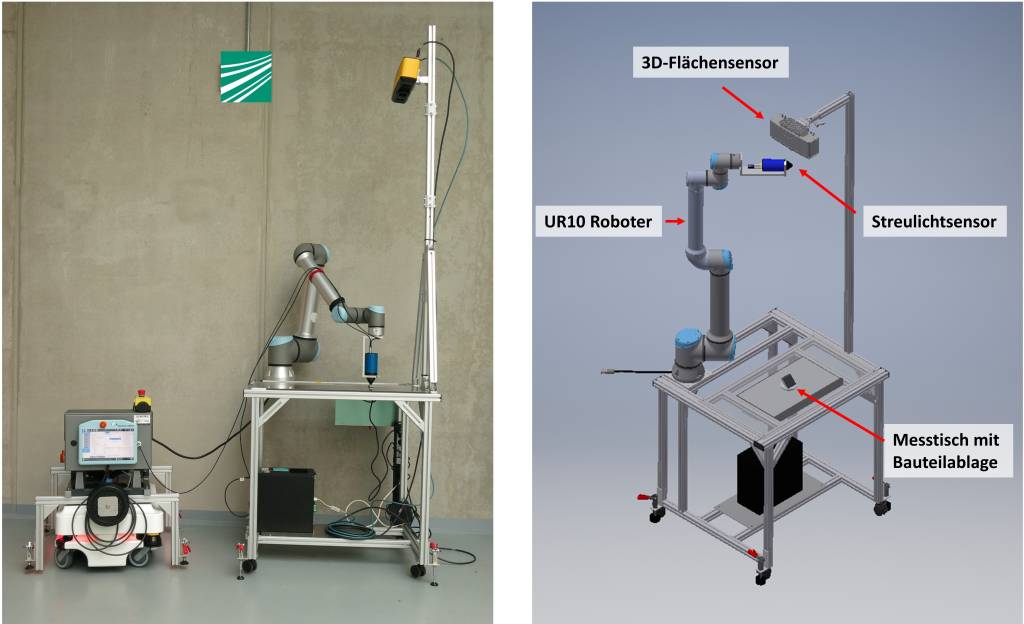
Mit der Entwicklung einer Messstation (Integration von Streulichtsensor an Leichtbauroboter) konnte erfolgreich ein Inline-Messsystem für die Oberflächenqualität additiv gefertigter Metallbauteile erstellt werden. Dabei wird die Position des Bauteils automatisiert erkannt und der Roboterpfad an Drehungen und Verschiebungen des Bauteils angepasst. Die Messung ist dabei sehr reproduzierbar und unabhängig von der Positionierung des Bauteils. Das wurde bereits auch schon an weiteren, komplexeren gedruckten Bauteilen durchgeführt. Insgesamt stellt diese Messtechnik eine passende Schnittstelle zwischen dem manuellen Prozess der Positionierung und der automatisierten Messung dar, die auch auf andere Bereiche erweitert werden kann, für die eine kollaborative Station einen Mehrwert darstellt. Darüber hinaus stellt diese Messstation eine so vorher nicht da gewesene Möglichkeit der inline-Qualitätskontrolle für den Oberflächenzustand 3D-gedruckter Bauteile dar.