
Der Anlauf von Roboteranlagen ist heute in vielen Fällen noch ineffizient – und damit ein entscheidender Kostentreiber. Insbesondere, wenn er bei der initialen Kalkulation nicht angemessen berücksichtigt wird. „Roboteranlagen werden heute in vielen Fällen im Vorfeld durchgängig simuliert und offline programmiert. Doch wenn man die Roboter vor Ort in Betrieb nimmt, reißt diese Durchgängigkeit meist ab“, erklärt Dr. Rainer Jäkel, CTO von ArtiMinds. „Sind im Anlauf noch Änderungen nötig, was in den meisten Fällen vorkommt, entsteht für den Anwender ein großer Aufwand.“ In der Folge gelten Roboteranwendungen bisweilen als schwer kalkulierbar, was sich wiederum zu einer Bremse für den Einsatz von Industrierobotern entwickeln kann.
Vorausschauende Aktivität – agile Reaktion
Durch die Nutzung vernetzter Tools lässt sich der Anlauf jedoch kontrolliert und ohne großen Zeitverlust durchführen. Dann werden Simulation, Sensorik, Datenanalyse und manuelle Eingriffe durch Inbetriebnehmer oder Instandhalter zu einem abgestimmten Orchester zusammengeführt. Möglichst weitreichende, vorausschauende Aktivitäten, z.B. der Einsatz von Sensorik zur Erfassung von Toleranzen, wird durch die digitalen Werkzeuge mit agiler Reaktion eng verzahnt.
„Heute gibt es zwei Ansätze: Entweder setzt man auf eine tiefgehende Toolchain, dann muss man aber mit vielen Brüchen zwischen Simulation, Programmierung, Inbetriebnahme und Service zurechtkommen. Oder man nutzt stark vereinfachte Software, die den Anlauf unterstützt, wie es sie z.B. für Cobots gibt. In diesem Fall fehlen jedoch viele Funktionen und weiterführende Tools“, schildert Dr. Sven Schmidt Rohr, CEO von ArtiMinds, die bisherige Herausforderung für den Anwender. „ArtiMinds ermöglicht jetzt einen Paradigmenwechsel – beide Ansätze werden vereint: Die Engineering-Kette wird damit durchgängig bis hin zur Instandhaltung, aber ohne dass der Anwender Einbußen bei der Funktionalität hinnehmen muss. Welche Vorteile das gerade in der Anlaufphase bringt, ist vielen Anwendern noch gar nicht bewusst.“ Wichtige Elemente der digitalen Werkzeugkette sind:
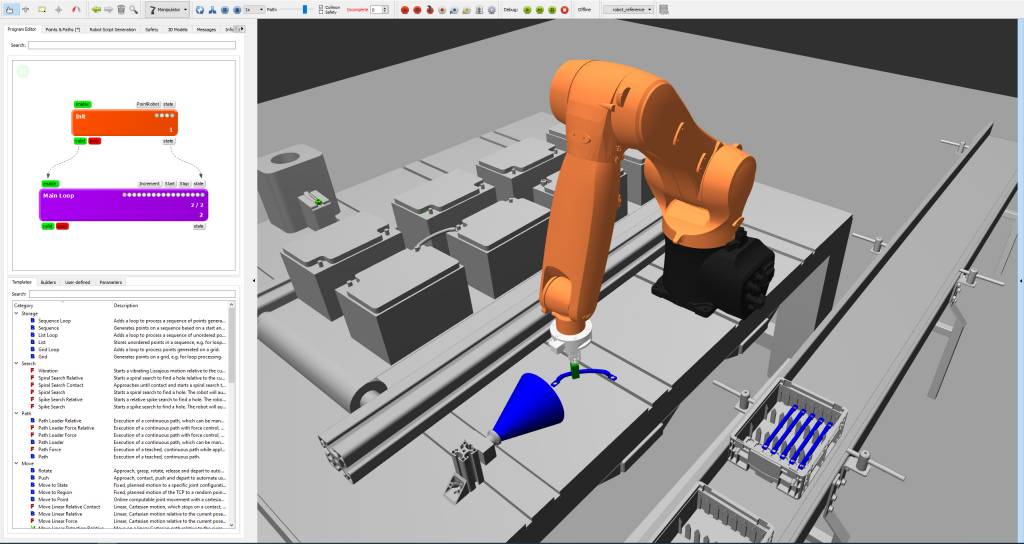
1) Eine einfach verständliche hardwareunabhängige Repräsentation des Roboterprogramms, das in einer Simulationsumgebung schnell angepasst und bewertet werden kann.
2) Die Nutzung von Sensorik für die kontinuierliche Datenerfassung und einen adaptiven Prozess.
3) Die ständige Sammlung von Anlagen- und Roboterdaten als Basis für prozessbezogene Analysewerkzeuge.
4) Die Möglichkeit manuelle Korrekturen durch Instandhalter an der Anlage einfach abzugleichen, egal ob mit der Simulationsumgebung oder Analyse-Tools.
Technisch steht bei ArtiMinds die maschinenunabhängige Abbildung des Roboterprogramms im Mittelpunkt. „So kann der Anwender von Beginn an Roboterprogramme schnell erstellen oder zuvor entwickelte Prozesse einfach parametrieren – ohne immer wieder von vorne beginnen zu müssen“, betont Jäkel. „Deswegen haben wir unsere Software auch konsequent auf eine Prozesserleichterung beim Anlauf ausgerichtet: anpassen, testen und verifizieren – direkt vor Ort, schnell, unkompliziert und zielgerichtet.“ Mit diesem Ansatz ist es möglich, sowohl die Überprüfung in der Simulation, die gezielte Datenanalyse als auch manuelle Korrekturen an der Anlage übersichtlich zusammenzuführen und zu synchronisieren. ArtiMinds verwendet hierzu ein auf Prozessvorlagen basierendes Abbild eines Roboterprogramms, das ArtiMinds Robot Task Model (ARTM). „Änderungen und Korrekturen beim Anlauf lassen sich so auf der Baustelle validieren, bevor sie in echt getestet werden“, fährt Jäkel fort. „Das ist mit den klassischen Simulations-Tools nicht oder nur sehr aufwändig möglich.“

Programmieren ohne Code-Schreiben
Von der Planung bis hin zur Inbetriebnahme unterstützt die Software von ArtiMinds die unkomplizierte Programmierung ohne textuellen Code. Neben Prozessvorlagen, etwa überwachtes Greifen, kraftbasiertes Fügen oder kamerabasiertes Ablegen, stehen die logischen Funktionen einer Programmiersprache ebenso zur Verfügung, wie umfangreiche Schnittstellen. Der aus dem Tool generierte native Robotercode läuft wie ein händisch geschriebenes Roboterprogramm auf der Standardsteuerung des Roboters. Das ermöglicht die automatische Aufzeichnung, Annotation sowie Übersendung von erfassten Daten während der Produktion an eine Edge-Umgebung. Die in einfach verständliche Ausführungsblöcke aufgegliederten Teilprozesse der Anwendung werden auf Basis der realen Prozessdaten analysiert. Der Anwender kann über ein Browserinterface die Robustheit des Prozesses überwachen, Abweichungen untersuchen oder sich Verbesserungen auf Basis mehrerer Prozessdurchläufe berechnen lassen. Letzteres bietet die Möglichkeit die klassische Inbetriebnahme, die von unkalkulierbaren Anpassungen geprägt ist, durch ein transparentes, zielgerichtetes und datengetriebenes Vorgehen zu ersetzen.
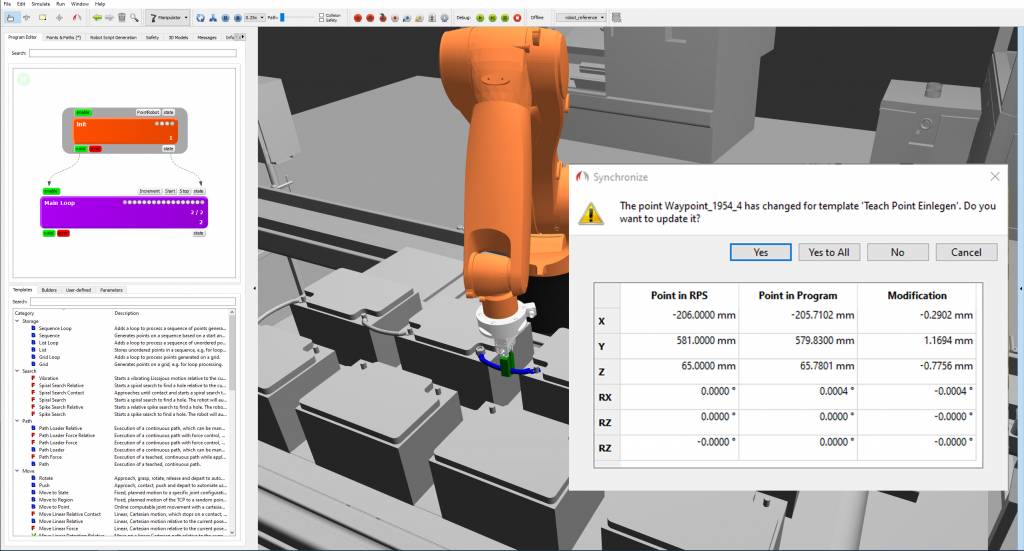
Die datengetriebene Unterstützung wird von der Möglichkeit ergänzt, Teach-Punkte direkt an der Anlage mit den Standardmitteln des Roboterherstellers anzupassen und diese einfach wieder in die ArtiMinds-Repräsentation zurückzuspielen. Dadurch liegen Änderungen sowohl in der Simulations- als auch in der Analyse-Software vor. Die Absicherung geplanter oder kurzfristiger Änderungen kann somit jederzeit mit dem digitalen Roboterprogramm erfolgen. Gerade bei der zeitintensiven Anpassung von Teach-Punkten bedeutet die enge Verzahnung von Programmierung und Simulation eine schnelleren, robusteren und besser planbaren Anlaufprozess.
Effektives Zusammenspiel aller Disziplinen
„Wenn beim Anlauf Änderungen an der Applikation vorgenommen werden, sind viele Disziplinen betroffen Simulation, Programmierung oder Datenanalyse“, resümiert Schmidt Rohr. „Unsere Software bringt als verbindendes Glied all diese Bereiche zusammen. Durch automatisch erzeugten Robotercode sowie dem automatischen Rückspielen von Teach-Punkten integriert sich die Lösung nahtlos in die bestehenden Inbetriebnahme- und Instandhaltungprozesse. Auf diese Weise wird ein effektives Zusammenspiel aller beteiligten Disziplinen möglich.“ CTO Jäkel ergänzt: „ArtiMinds bietet mit seinen Software-Lösungen einen Mehrwert, den man aus dem initialen Engineering oder der SPS-Programmierung schon kennt: Transparenz und Durchgängigkeit. Damit unterstützt unsere Lösung den Anlauf massiv. Auch direkt auf der Baustelle lassen sich die Tools aus dem Engineering weiterhin nutzen.“ Im Endergebnis erhält der Anwender eine Roboterlinie, die weiterhin alle Anforderungen an Taktzeit und Verfügbarkeit erfüllt, aber zusätzlich effizient in Betrieb genommen und instandgehalten werden kann, bei gleichzeitig verbesserter Planbarkeit.