
Die effiziente Nutzung der Betriebsfläche ist für die Produktivität ebenso wichtig wie die Wahl der passenden Ausrüstung. So wie Mitarbeiter brauchen auch Maschinen, z.B. Pick&Place-Roboter, für Aufgaben wie Verpacken und Palettieren ihre Bewegungsfreiheit. Darüber hinaus können auch Sperrbereiche erforderlich sein, um die Sicherheit des Personals zu gewährleisten, das in der Nähe des Roboters arbeiten muss. Der gesamte Arbeitsbereich kann wesentlich größer sein als der Roboter selbst, sodass der zusätzliche Platz in der Fabrik nicht für andere Zwecke genutzt werden kann.

Der Knickarmroboter
Wenn ankommende Gegenstände von einer Palette auf ein Transportband befördert werden müssen, kann ein Knickarmroboter eine schnelle und wiederholgenaue Lösung bieten. Diese sind relativ unkompliziert auszuwählen, zu installieren und zu programmieren. Es wird eine sichere Standfläche benötigt, die je nach bewegten Massen und Nutzlast sehr groß sein kann. Der Roboter wird in der Regel seitlich vom Arbeitsbereich positioniert, weit genug entfernt von Strukturen wie z.B. Transportbändern, damit er sich bewegen und die Zielpositionen zum Aufnehmen und Ablegen von Objekten erreichen kann. Seine Größe und Konstruktion richtet sich nach den bewegten Massen und der Nutzlast. Die komplette Automatisierungslösung kann im betriebsbereiten Zustand eine große Fläche einnehmen.
Nach einer gewissen Zeit muss die Produktionsstätte zwangsläufig umorganisiert werden, um neue Anlagen und Verfahren einzuführen und um den veränderten Geschäftsanforderungen gerecht zu werden. Vielleicht wird eine zusätzliche Produktionslinie oder einfach mehr Platz für die Lagerung des Warenbestands benötigt. Eine Erweiterung oder Vergrößerung der Fabrik kann praktisch unmöglich sein; ein Umzug in größere Gebäude ist sehr teuer und mit Unterbrechungen verbunden. Die Rückgewinnung von Produktionsfläche um einen großen, schweren Roboter kann eine attraktive Alternative sein. Es gibt tatsächlich einige Optionen, die man hierfür in Betracht ziehen kann.
Der Deltaroboter
Einige Roboter, wie z.B. Parallelarmroboter (Deltaroboter), sind so konstruiert, dass sie direkt über ihrem Arbeitsbereich installiert werden können und den Platz seitlich eines Förderbandes frei machen, der sonst von einem Knickarmroboter eingenommen werden würde. Diese können jedoch schwierig zu konfigurieren sein. Ein stabiles Rahmengestell ist erforderlich, um das Gewicht des Roboters zu tragen. Außerdem kann der Roboter hoch bauen, wenn eine große Reichweite erforderlich ist. Die erzielten Einsparungen können durchaus gering sein.
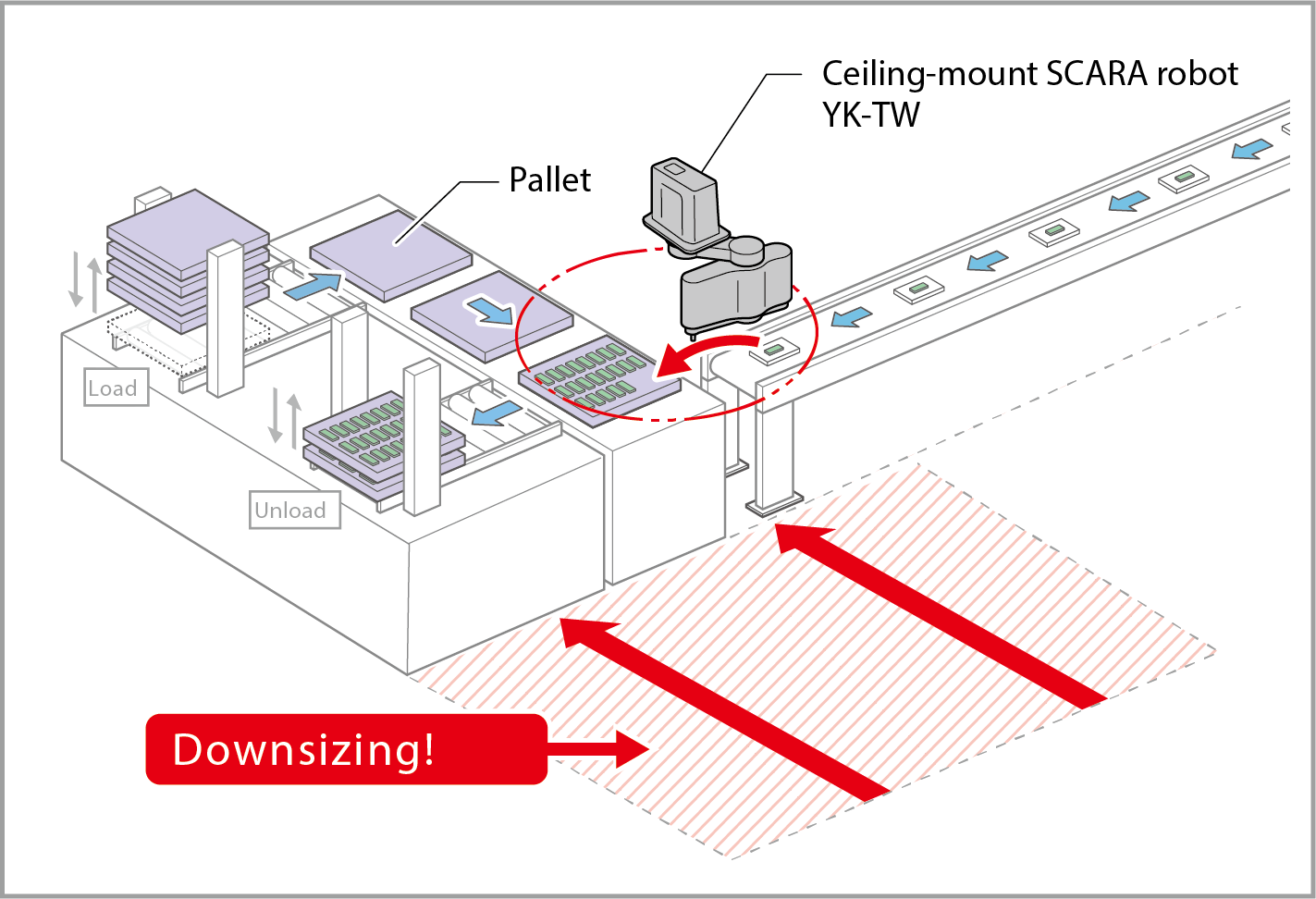
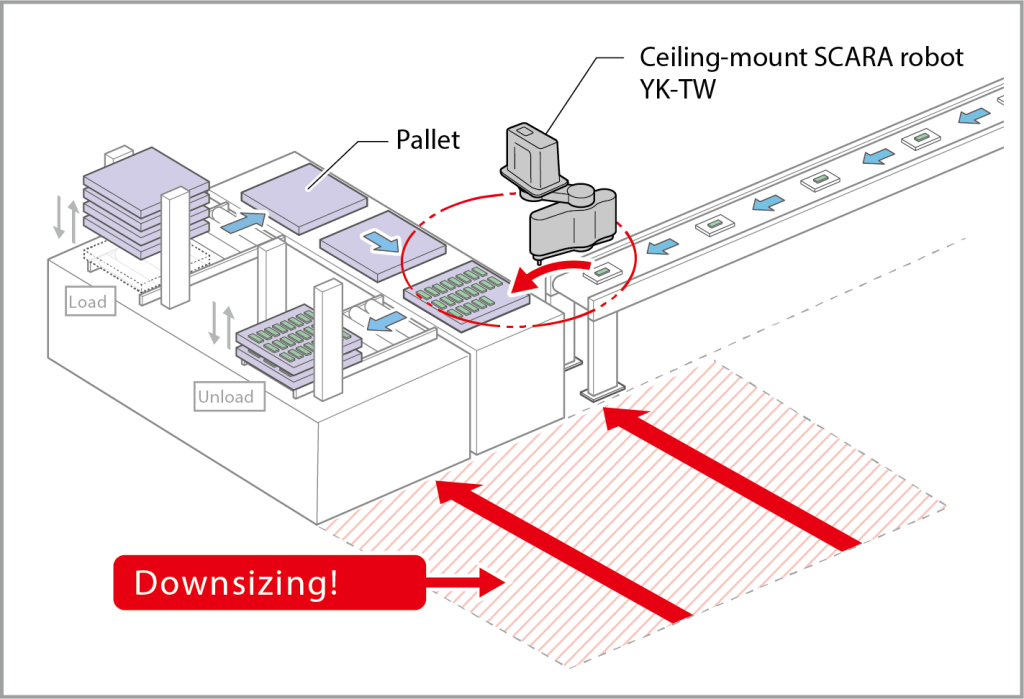
Scara-Roboter und Orbital-Scara-Roboter
Andererseits kann ein Scara-Roboter eine kleinere Stellfläche beanspruchen, insbesondere in Relation zu seiner Tragfähigkeit. Die Wahl eines Scara-Systems kann weitere Vorteile bieten, wie z.B. einfachere Programmierung, höhere Genauigkeit der Z-Achse sowie eine hohe Geschwindigkeit und Beschleunigung.