

Huaray (Dahua) hat eine Stereosichttechnik (ISP) für das Bin-Picking entwickelt.
Ausgabe: ROBOTIK UND PRODUKTION 2 (Hannover Messe) 2020
Automatisierte Radmontage

Ein Automobilbauer suchte nach einer Lösung für die automatisierte Radmontage.
3D-Bin-Picking-Lösung für Roboter
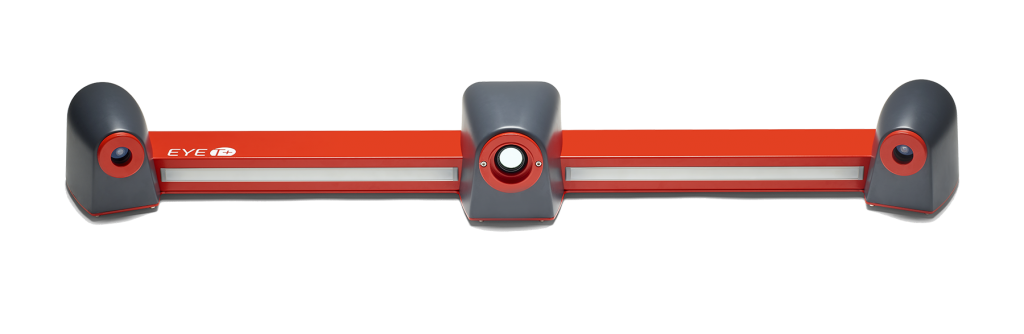
Die neue 3D-Bin-Picking-Lösung von Robotics ermöglicht eine schnelle Objekterkennung in wenigen Zehntelsekunden.
Kamera für Roboterlösung von SEW-Eurodrive

Um für seine Pick&Place-Roboter eine kamerabasierte Führung zu realisieren, hat SEW-Eurodrive mit Unterstützung von Sick Funktionsbausteine für die 2D-Kamera PLOC2D und die 3D-Kamera Trispector1000 entwickelt.
Bin-Picking-System mit KI-Vision

Das Bin-Picking-System InPicker von Stemmer setzt verschiedene 3D-Bildverarbeitungstechniken wie z.B. Stereoskopie (aktiv und passiv) oder Lasertriangulation ein, um die exakte Position von Objekten zu bestimmen, die sich unsortiert in einem Behälter befinden.
Cobot-Vision-System mit IOTA

Die neue QBIC-Cobot-Station von Cretec erschließt mit dem hochskalierbaren IOTA-Kommunikationsprotokoll neue Möglichkeiten.
Greifer für die vollautomatische Kommissionierung
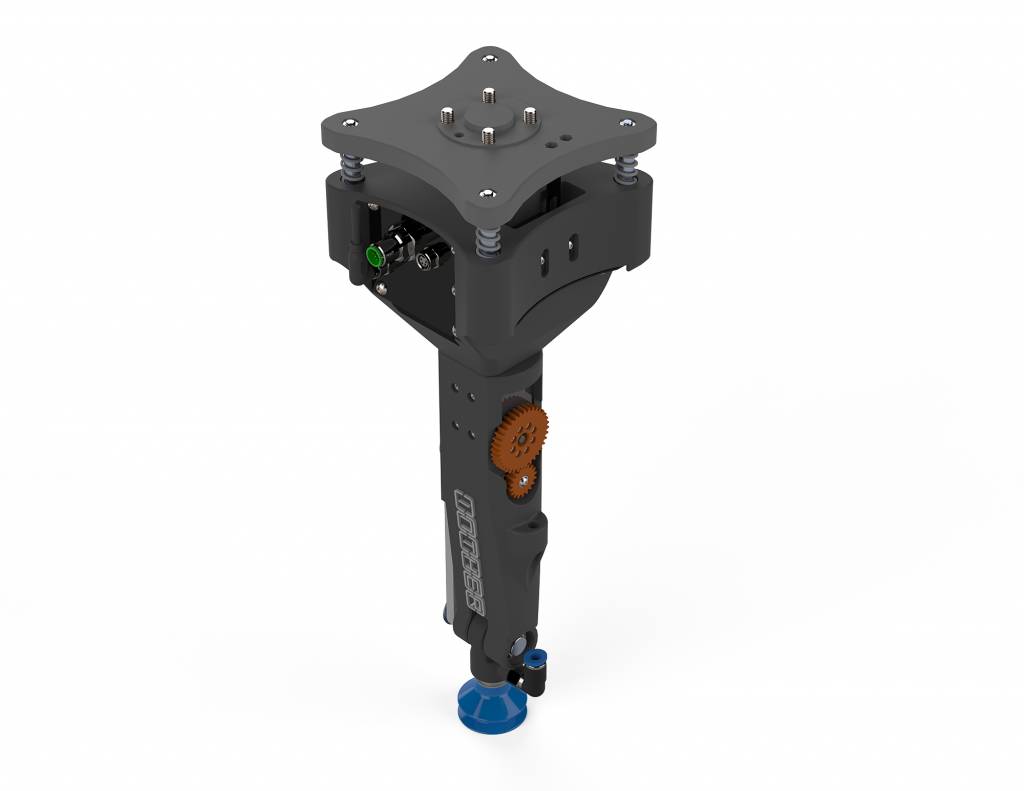
Der Greifer Gripp (Gantry Robotic Intelligent Piece Picker) von Inther hat eine große Reichweite, ist kompakt und verarbeitet bis zu 1.200 Artikel pro Stunde.
Leicht bedienbare Bin-Picking-Software
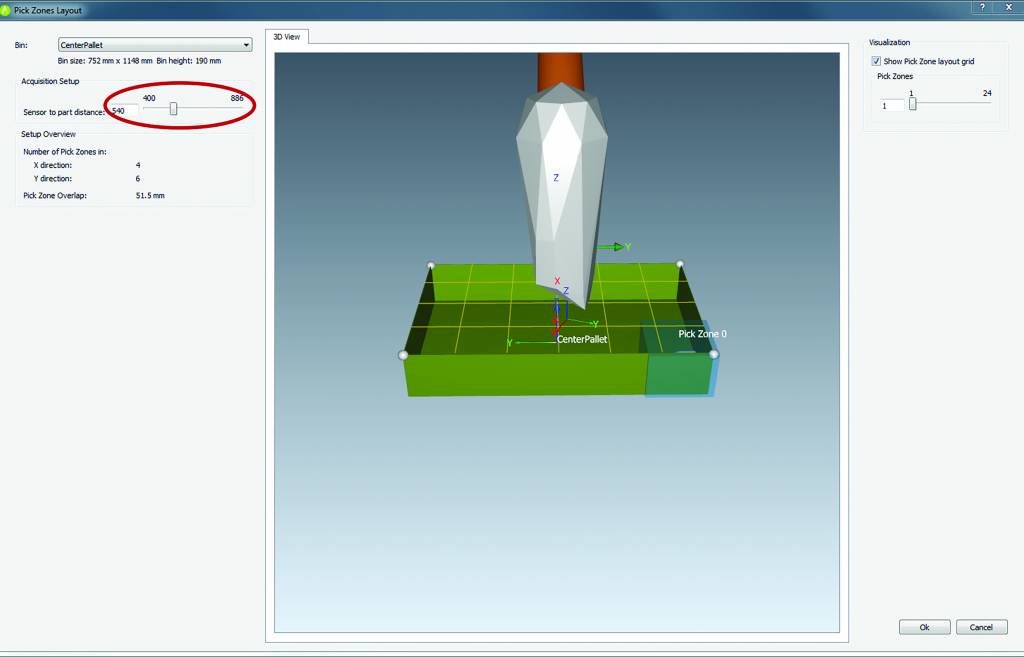
Scape Technologies hat neue Designprinzipien in seine Software eingeführt, die es einfacher machen sollen, Roboter für Bin-Picking-Lösungen zu konfigurieren.
„Ich kann es nicht lassen“
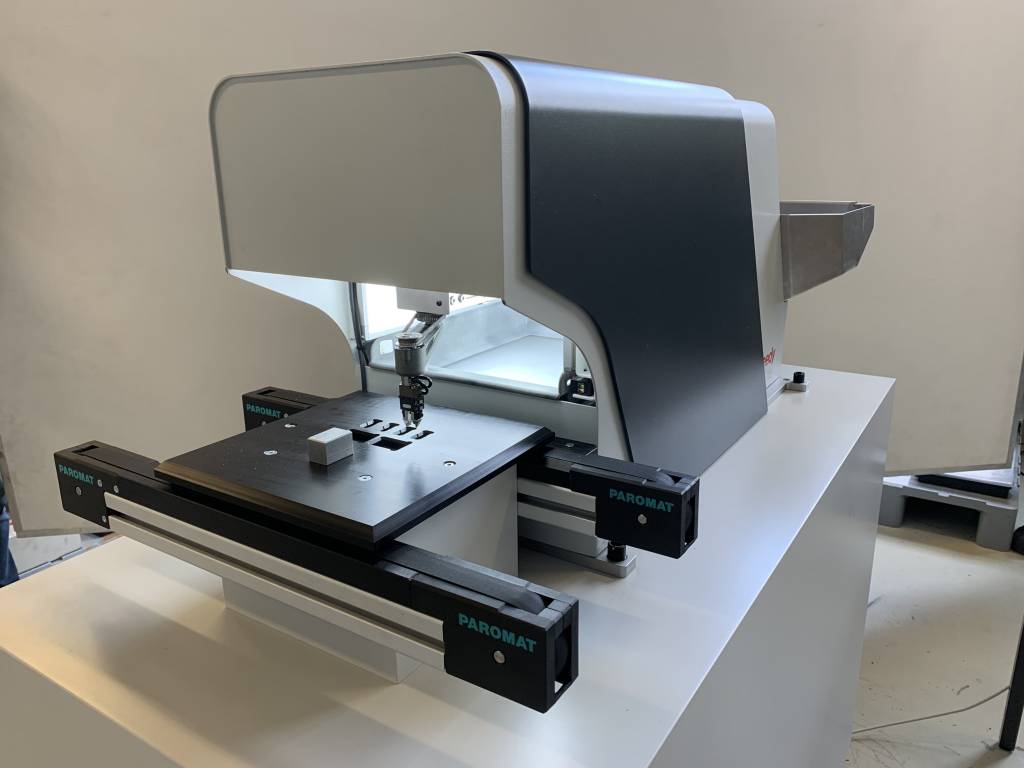
Martin Fraunfelder war neun Jahre lang Geschäftsführer von Mikron Automation. Er ist seit 2003 Eigner der Firma Paro und mittlerweile deren Verwaltungsrat-Präsident. Warum er jüngst auch noch das neue Unternehmen Feedy gegründet hat, welches das gleichnamige Zuführsystem entwickelt und baut, erklärt er in Interview mit ROBOTIK UND PRODUKTION.
Tragende Rolle

Wie lassen sich die Vorteile autonomer Lösungen in der Industrie mit den menschlichen Fähigkeiten am besten kombinieren? Was sollte ein lernfähiges autonomes Kommissionier-System alles beherrschen und welche Sicherheitsvorrichtungen sind nötig, um Fahrzeuge autark im öffentlichen Raum zu betreiben? Antworten auf diese Fragen liefert das Forschungsprojekt QBIIK, das im Juni diesen Jahres nach dreieinhalb Jahren Entwicklungsarbeit endet.