
Auf Anfrage eines Industrieunternehmens hat die Firma EduArt Robotik eine Lehr- und Prototyping-Plattform entwickelt, die für die Aus- und Weiterbildung von Mitarbeitern im Umgang mit mobiler Robotik genutzt werden kann. Zusätzlich zur Roboterlernplattform bietet das Unternehmen ein Lehr- und Serviceangebot zum Testen und Anpassen.

Erweiterbare Roboterlernplattform
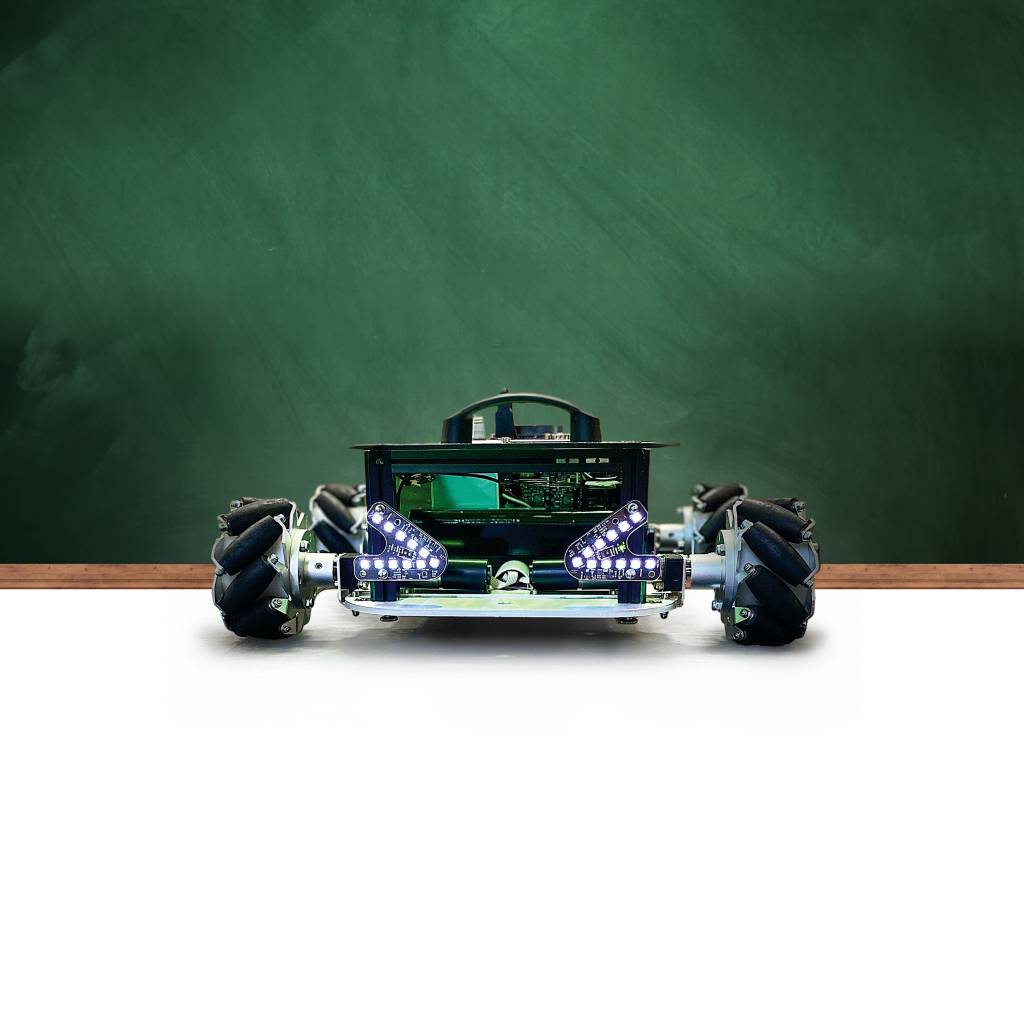
Die Roboterlernplattform heißt Eduard, ist rund 40x40x15cm groß und wiegt knapp 8kg. In ihr ist ein Sensorkonzept samt Distanz- und Inertialmessgeräte integriert sowie ein Batteriemanagementsystem. Der Zugriff ist über offene Schnittstellen möglich. Für die Bewegung des mobilen Roboters sorgen entweder einfache Gummireifen oder aber Mecanum-Räder. Letztere ermöglichen es dem Roboter, auf der Stelle zu drehen sowie seitlich oder diagonal zu fahren. Auch in sehr engen Räumen kann so navigiert und exakt positioniert werden. Bei beiden Rädervarianten kommen Faulhaber-Motoren zum Einsatz. „Die qualitativ hochwertigen Antriebe haben sich für unsere Anwendungsfälle als passend erwiesen“, bestätigt Markus Fenn, Geschäftsführer von EduArt Robotik. Je nachdem, welche Geschwindigkeit bzw. welches Drehmoment gefordert ist, stehen am Antrieb Getriebe mit einer Übersetzung von 72:1 oder 89:1 zur Wahl. Die Basisausstattung der Roboterlernplattform kann der Anwender selbst erweitern oder von EduArt gemäß den eigenen Bedürfnissen anpassen lassen.
Flexible Antriebstechnik
Bei der Wahl der eingesetzten Antriebssysteme galt es zu berücksichtigen, dass diese auch zukünftige Anforderungen von FTS- und AMR-Konzepten erfüllen müssen. Die Wahl fiel daher auf DC-Kleinstmotoren mit Edelmetallkommutierung von Faulhaber. Sie liefern trotz ihrer geringen Abmessungen ein großes Drehmoment und zeichnen sich durch ihre hohe Leistungsdichte aus. Zudem lassen sie sich präzise ansteuern und eignen sich für hochgenaue Regelkreise. Für größere Plattformen haben die Roboterbauer große DC-Motoren desselben Herstellers verwendet. Alternativ lassen sich diese Antriebe aber je nach Anwendung auch durch wartungsfreie und langlebige bürstenlose DC-Motoren ersetzen.
Software einfach entwickeln und testen
Komplex an FTS- und AMR-Lösungen ist in der Regel nicht die Hard-, sondern vielmehr die Software. So ist z.B. gute Planung auf Softwareseite wichtig, damit alle mobilen Roboter problemlos zusammenarbeiten oder ein zuverlässiges Flottenmanagement möglich wird. Roboter müssen dazu selbst denken, sich über Standardschnittstellen austauschen und wenn nötig kooperieren. Die Software muss dabei nur wenig über den jeweiligen mobilen Roboter wissen, sondern lediglich berechnen, wo der Roboter auf dem Hallenplan lokalisiert ist. Die Navigation, die als eine der wenigen Komponenten die Maße des Roboters kennt, sucht dann den geeigneten Pfad. Um die geforderte Geschwindigkeit zu erreichen, errechnet der Motor-Controller, wie viele Radumdrehungen nötig sind. Auch um das anzupassen, werden nur wenige Zeilen im Programmcode oder eine Konfigurationsdatei benötigt. Faulhaber liefert dazu Motoren mit Getrieben und Encodern für eine exakte Positionierung.
Hohe Sicherheit
Ebenfalls wichtig beim Einsatz von mobilen Robotern ist das Thema Sicherheit, und zwar im Sinne von Security und Safety. Letztere wird z.B. dadurch erreicht, dass der Motor-Controller erkennt, wenn einer der Motoren ausfällt und die Fahrt sofort stoppt. Tritt ein Mensch in den Fahrbereich, wird dieser vom Laserscanner wahrgenommen und das System bremst. Safety ist insofern ein spannendes Thema, als dass die einzelnen mobilen Roboter über Kommunikationsnetzwerke, wie WLAN oder 5G, miteinander kommunizieren. Auch hierfür wurden Schutzmechanismen realisiert. Sollte es dennoch zu einem Hacker-Angriff kommen, ist es wichtig, dass auf dem Roboter keine gefährlichen Bewegungen ausgelöst werden können. Dazu sind die Roboter u.a. mit einem Sicherheitsscanner mit Abstandssensor versehen, damit sie z.B. nicht gegen die Wand fahren.