
Stiwa will künftig sein Portfolio erweitern und Faktoren wie Flexibilität, Kosteneffizienz, Nachhaltigkeit sowie Investitions- und Zukunftssicherheit für kleinere Produktions-Stückzahlen in den Mittelpunkt stellen. „Unser Hauptaugenmerk bleibt aber weiterhin auf der Hochleistungsautomation. Die Standard Performance verstehen wir als sinnvolle Ergänzung, um für unsere Kunden das komplette Spektrum der Automation abdecken zu können.“, so Jürgen Götschhofer, Leiter des Geschäftsbereichs Automation.
In der platzsparend ausgelegten Anlage, die bei Stiwa am Standort Gampern läuft und im vierten Quartal 2023 ihren Betrieb aufgenommen hat, wird das Innenleben für einen Dreh-Drücksteller mit voll programmierbarer haptischer Rückmeldung hergestellt. Der sogenannte Hapticore von Stiwa Advanced Products kommt in den Naga-Gaming-Mäusen des Computergeräteherstellers Razer zum Einsatz und sorgt dort für ein besonders gutes haptisches Feedback des Scrollrads.

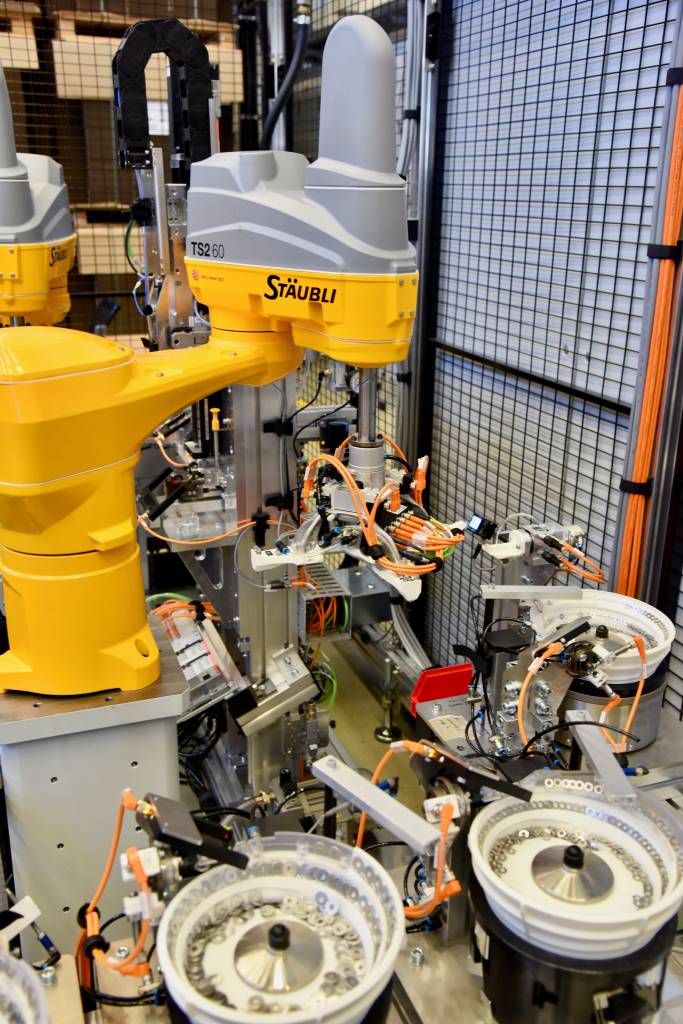
Vierachser für die Handhabung
Stiwa setzt bei dieser Automatisierungslösung auf fünf Scara-Roboter vom Typ TS2-60 von Stäubli, die die Handhabung winziger Zuführteile übernehmen. „Die Montage des Hapticore war gut geeignet für unseren Einstieg in die robotergestützte Smart Automation“, betont Andreas Baldinger, der gemeinsam mit seinem Team für die technische Umsetzung der Anlage verantwortlich zeichnet. „Stiwa Advanced Products wollte eine flexible Automationslösung für die kosteneffiziente Montage für zunächst eine Variante in mittleren Stückzahlen. Da mit weiteren Varianten zu rechnen ist, sollte die Anlage die nötige Flexibilität für deren Montage mitbringen. Mit unserem neuen Automationsansatz und den Robotern können wir diesem Wunsch nachkommen.“
Vergleicht man die klassische Stiwa-Hochleistungsautomation mit der Smart Automation ist der wohl augenscheinlichste Unterschied der Verzicht auf die starre, aber schnelle Verkettung über das eigenentwickelte Transfersystem. An dessen Stelle rücken dynamische Roboter, in diesem Fall die fünf Stäubli-Vierachser, die zwar nicht die kurzen Taktzeiten des Transfersystems erreichen, dafür aber mit hoher Flexibilität und Kosteneffizienz punkten.
Offene Steuerungsarchitektur
Neben der hohen Dynamik bei gleichzeitig hoher Präzision der Scaras sprach ein weiteres ausschlaggebendes Kriterium für deren Einsatz. Dazu Baldinger: „Wir waren von der weitreichenden Offenheit der Stäubli-Steuerungsarchitektur bis runter in die Regler der einzelnen Achsen begeistert. Die Möglichkeiten, die Stäubli hier für eigene steuerungstechnische Bahnoptimierungen bietet, fanden wir bei keinem anderen Roboterhersteller. Und auch die Anbindung über vordefinierte Schnittstellen an die Beckhoff-SPS, die wir im Bereich der Smart Automation nutzen, ist vorbildlich gelöst. Durch die UniVal-SPS-Schnittstelle kann man hier wirklich von Plug&Play sprechen, mit entsprechenden Vorteilen auch im Bereich der Sicherheitstechnik.“
Was auffällt an der Anlage, ist die klare Handschrift bei der Auslegung der Arbeitsstationen. Die Roboter übernehmen grundsätzlich keine Montage-, sondern durchgängig reine Handhabungsaufgaben, die allerdings anspruchsvoll sind. Da für die komplette Montage eines Hapticore inklusive integrierter Qualitätsprüfungen rund 14 Arbeitsschritte erforderlich sind, ist nahezu jeder Roboter aufgrund der komplexen Prozesse voll ausgelastet und taktzeitkritisch. Zu den Prozessschritten innerhalb der Anlage zählen Zuführen, Fügen, Verpressen, Dosieren, Magnetisieren sowie ein aufwendiger Haptiktest am Ende der Linie, bei dem kleinste Drehmomente von unter einem Millinewtonmeter geprüft werden sowie die abschließende Verpackung.
Greifer, Zuführungen und mehr aus dem 3D-Drucker
Um den hohen Funktionsumfang an jeder Station mit den Scaras abbilden zu können, ist jeder Vierachser mit einem von Stiwa konstruierten Vierfach-Greifsystem ausgestattet. Die vielfältigen Greifmöglichkeiten erlauben es den Robotern, ihre Aufgaben möglichst effizient auszuführen und Leerfahrten zu vermeiden. Dabei sind Dynamik und hohe Präzision gefragt.