

Die Rolle von Cobots wird in Zukunft bei der Unterstützung von Personen immer wichtiger werden, da besonders in Deutschland zwei Trends die Arbeitswelt maßgeblich beeinflussen und zukünftig deutlich spürbar für das produzierende Gewerbe werden. Es geht um den demografischen Wandel und den zunehmenden Fachkräfteengpass. Durch das steigende Renteneintrittsalter leiden Arbeitnehmer im fortgeschrittenen Alter häufiger unter Muskel- und Skeletterkrankungen. Auf der anderen Seite können betroffene Arbeitskräfte, die ihre aktuelle Tätigkeit aufgrund ihrer körperlichen Einschränkungen nicht mehr ohne Hilfe ausführen können, nicht ersetzt werden. Das liegt vor allem daran, dass qualifiziertes Personal fehlt, um die Lücken wieder zu schließen. Zudem ist eine Umschulung und ein Einlernen neuer Arbeitskräfte für das betroffene Unternehmen immer mit hohen Kosten verbunden, da das Knowhow des ausgeschiedenen Mitarbeitenden nicht in gleichem und für die Tätigkeit oftmals erforderlichem Umfang ersetzt werden kann. Wie können nun die entsprechenden Arbeitnehmer und das jeweilige Unternehmen diesen Trends begegnen?
Cobot mit intuitiver Bedientechnik
An dieser Stelle setzt das Forschungsprojekt RobIn4LeMi (Robotergestützte Interaktionssysteme für Leistungsgewandelte Mitarbeitende) an. Unter leistungsgewandelten Mitarbeitenden werden diejenigen Personen verstanden, die temporär oder auf Dauer nicht mehr an ihrem bisherigen Arbeitsplatz tätig sein können, da sie aufgrund von Krankheiten oder eines Unfalls nicht mehr in der Lage sind, bestimmte Anforderungen oder Belastungen zu erfüllen. Oftmals kann aber durch eine Anpassung des Arbeitsplatzes mithilfe von Unterstützungssystemen der Mitarbeitende weiterhin seine Leistung erbringen.
Das Ziel von RobIn4LeMi ist es daher, einen Cobot mit intuitiver Bedientechnik einzusetzen, um leistungsgewandelte Personen an ihrem Arbeitsplatz zu erhalten. Hierzu wird im Projekt ein Konfigurationswerkzeug entwickelt, das die individuellen Fähigkeiten und körperlichen Einschränkungen einer Person mit den für die Tätigkeit erforderlichen Körperfunktionen abgleicht. Basierend auf diesem Abgleich und den identifizierten Diskrepanzen wird ein Robotersystem mit passender Bedientechnik individuell konfiguriert.
Demonstrator zur Evaluation
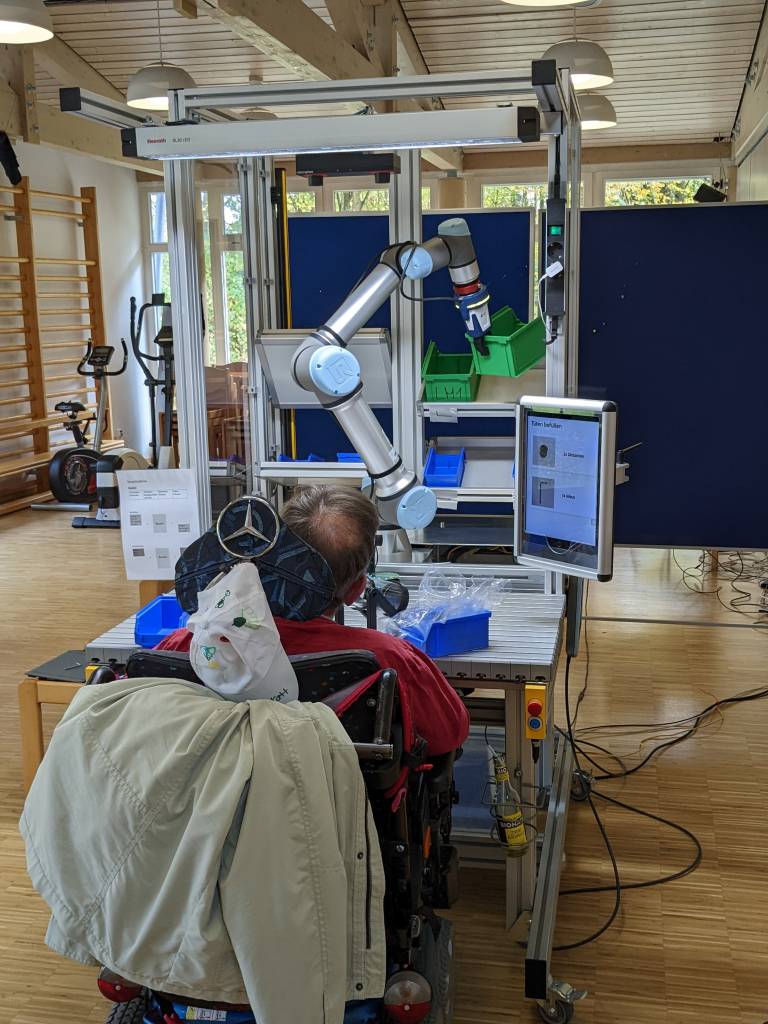
Um die Funktionsweise eines Systems, wie oben beschrieben, zu evaluieren, wurde ein Demonstrator aufgebaut. Die Partner des Konsortiums bestehen dabei aus den Firmen MaibornWolff, Roboception und Tawny sowie aus dem Fraunhofer IGCV und den Ulrichswerkstätten in Schwabmünchen. Ziel des Demonstrators ist es, die im Projekt gewonnenen Erkenntnisse hinsichtlich der Zusammenarbeit aus leistungsgewandelter Person und einem Robotersystem direkt umzusetzen und zu evaluieren. Der Demonstrator beinhaltet einen Cobot mit 5kg Traglast und unterschiedlichen Ein- und Ausgabetechniken. Je nach Präferenz der Personen können diese verwendet werden und es ermöglichen, intuitiv, z.B. über eine Sprachsteuerung, mit dem Roboter zu interagieren.
Erste Feldtests
Innerhalb des Projekts wird der Demonstrator in verschiedenen Feldtests bei den Ulrichswerkstätten in Schwabmünchen, einer Einrichtung für Menschen mit unterschiedlichen Formen der Leistungswandlung, erprobt. Bei den Tests dürfen ausgewählte Testpersonen den Demonstrator unter realen Bedingungen ausprobieren und im Anschluss Feedback zu den einzelnen Funktionen geben. Im ersten Feldtest lernten die Probanden den Demonstrator in einer isolierten Umgebung kennen. Eine Probandin sitzt im Rollstuhl und hat Spastiken in beiden Beinen und der rechten Hand, wodurch diese nur eingeschränkt bewegbar ist. Ein anderer Proband sitzt in einem Elektrorollstuhl und hat ebenfalls spastische Lähmungen und dadurch eine sehr eingeschränkte körperliche Reichweite. Durch diese Einschränkungen ist es für beide Personen eine große Herausforderung, Tätigkeiten, die beide Hände erfordern, umzusetzen. Hier setzt das Forschungsprojekt an: Mithilfe eines Cobots können einfache Halte- oder Anreichtätigkeiten vom Roboter übernommen werden. So können sich die Personen auf ihre primären Tätigkeiten konzentrieren.