Bediene die Maschine und entdecke Beiträge aus der Industrie.
Kollisionsfrei unterwegs
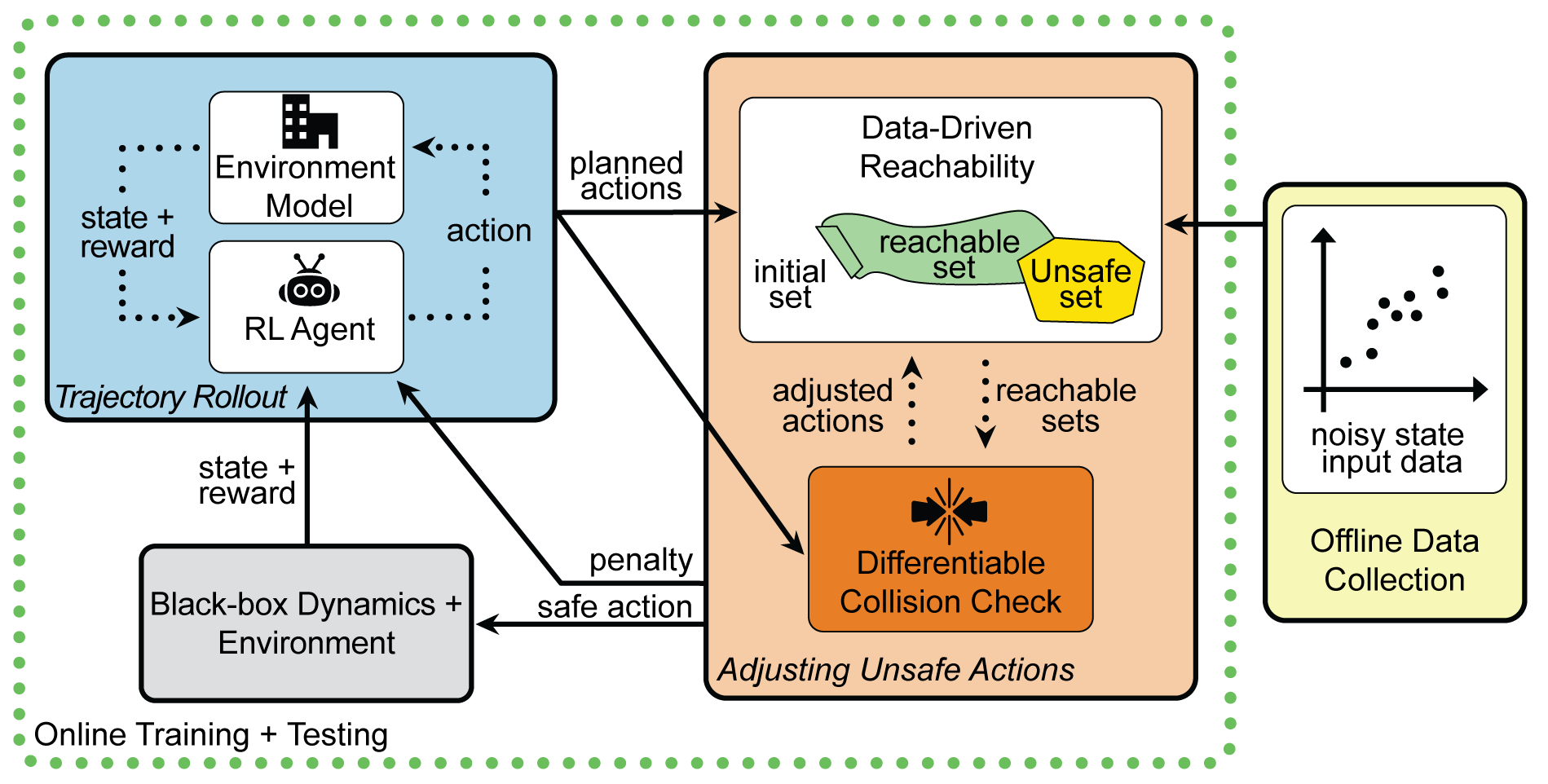
Damit RL-Agenten in Echtsituationen zum Einsatz kommen können, muss es daher zusätzliche Sicherheitsfunktionen geben, die möglichst Performance-freundlich sind. Dem Team von Wissenschaftlern ist es mit Hilfe des BRSL gelungen, die Sicherheit wesentlich zu erhöhen und gleichzeitig das System nur geringfügig einzuschränken.
Damit RL-Agenten in Echtsituationen zum Einsatz kommen können, muss es daher zusätzliche Sicherheitsfunktionen geben, die möglichst Performance-freundlich sind. Dem Team von Wissenschaftlern ist es mit Hilfe des BRSL gelungen, die Sicherheit wesentlich zu erhöhen und gleichzeitig das System nur geringfügig einzuschränken. – Bild: Amr Alanwar / TUM Campus Heilbronn GmbH
Mit Hilfe von Reinforcement-Learning-Algorithmen können Roboter auch anspruchsvolle Bewegungen in einer unbekannten Umgebung und bei unbekannten Robotermodellen erlernen – doch wie kann man sicherstellen, dass sie Sicherheitsbeschränkungen respektieren, ohne dass sich ihre Performance verschlechtert?