

RightHand Robotics hat das neue RightPick4-System für die Stückgutkommissionierung vorgestellt.
Kategorie: Künstliche Intelligenz & maschinelles Lernen
Neue Roboter, KI-Software und Teach-Einheit

Die neuen Melfa-Roboterarme von Mitsubishi Electric bieten mehr Traglast und höhere Reichweiten.
Intelligentes Stückgut-Kommissioniersystem

RightHand Robotics hat das neue RightPick4-System für die Stückgutkommissionierung vorgestellt.
Neue Knickarmroboter, KI-Software und Teaching-Einheit

Die neuen Melfa-Roboterarme von Mitsubishi Electric bieten mehr Traglast und höhere Reichweiten.
Depalettierzelle mit AMR

ABB hat auf der diesjährigen Logimat die neueste Generation KI-gestützter Robotiklösungen gezeigt, darunter den autonomen mobilen Roboter Flexley Tug T702, den ersten einer ganzen Reihe von mobilen ABB-Robotern mit Visual-SLAM-Navigation.
Robotik-Forschungsplattform

Franka Robotics hat mit Franka AI Companion eine neue Robotik-Forschungsplattform zur Unterstützung von Forschenden im Bereich Robotik entwickelt.
Transportroboter mit kamerabasierter Gabelerkennung
Pixel Robotics hat auf der diesjährigen Logimat seine modularen Roboter für den Palettentransport vorgestellt.
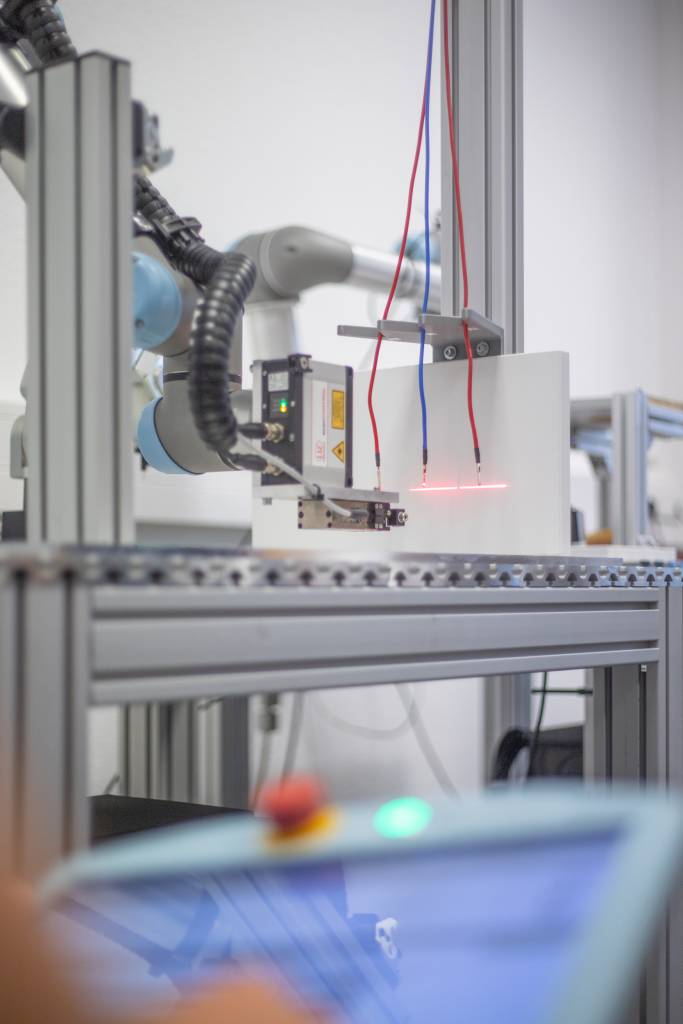
Cobot zeichnet mithilfe von KI-Bilderkennung
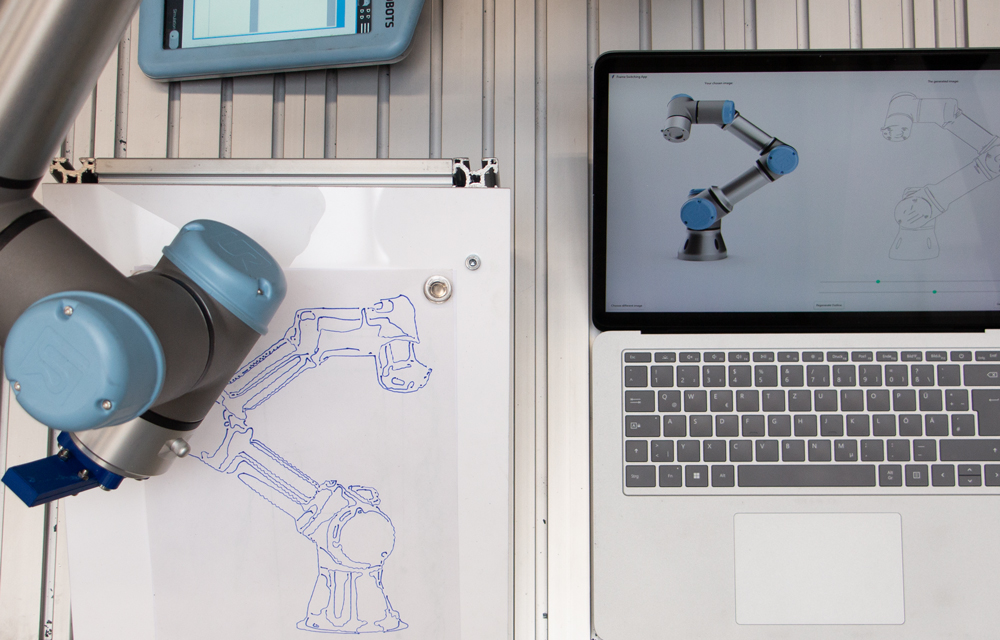
Einen Cobot, der zeichnen kann, zeigt das Institut für Integrierte Produktion Hannover (IPH) auf der diesjährigen Hannover Messe.
Intelligente Zuführung

Mit der GlassFeeder-Serie hat der spanische Automatisierer Teknics ein Zuführsystem mit hoher Flexibilität entwickelt. Mithilfe von Deep Learning passt sich die Anlage an unterschiedliche Größen, Formen und Oberflächen von Parfümflakons an und erfüllt die hohen Anforderungen der Kosmetikindustrie an Prozesssicherheit und Hygiene. Zwei Scara-Roboter von Stäubli sorgen dabei für die ebenso schnelle wie präzise Handhabung der Flakons.
Wie gelingt die Roboterintegration?
Um Unternehmen gegen kurzfristige Veränderungen und Anforderungen abzusichern und ihre Wettbewerbsfähigkeit zu erhalten, sind neue, flexiblere Automatisierungslösungen mit Robotern gefragt. Damit roboterbasierte Lösungen aber zu Kosteneinsparung und Effizienzsteigerung führen, kommt es weniger nur auf die richtige Technik und Hardware als vielmehr auf strukturierte Vorüberlegungen und das Erarbeiten zeitgemäßer Automatisierungskonzepte an.