

In vielen produzierenden Unternehmen in verschiedenen Branchen steht die Frage im Raum: Was ist bei der Konstruktion und auch im Betrieb von Roboterzellen mit Mensch/Roboter-Kollaboration zu beachten? Für diese neue Art der Zusammenarbeit mussten normative Grundlagen geschaffen werden mit dem Ziel, den Roboter mit Sicherheitseinrichtungen zum Schutz des Menschen auszustatten und ihn zum kollaborierenden Roboter zu machen. Wie generell in der Maschinensicherheit (und das heißt: im Geltungsbereich der Maschinenrichtlinie) gilt in der kollaborativen Robotik die Normenpyramide von harmonisierten Typ A-, Typ B- und Typ C-Normen.
Die allgemeine Normenpyramide
Als Typ-A-Normen bezeichnet man die Sicherheitsgrundnorm ISO12100 (Risikobeurteilung). Etwas konkreter werden die Typ-B1-Normen, die sich mit speziellen Sicherheitsaspekten befassen. Beispiele sind die bekannte ISO138349 (Sicherheitsbezogene Teile von Steuerungen) und ISO11161 (Integrierte Fertigungssysteme). Die Typ-B2-Normen treffen Aussagen zu einzelnen Arten von Sicherheitsgeräten, z.B. zu Nothalteinrichtungen (EN ISO13850). Speziell für die Robotik gibt es mehrere Fachnormen oder Typ-C-Normen. Dazu gehören:
- EN/ISO10218 Industrieroboter – Sicherheitsanforderungen, gegliedert in
- Teil 1 (Roboter)
- Teil 2 (Robotersysteme und Integration). Hier werden Sicherheitsanforderungen an Roboterzellen definiert.
- ISO/T15066 Roboter und Robotikgeräte – kollaborierende Roboter
Die Technische Spezifikation ISO/TS15066 ist allerdings nicht harmonisiert, d.h. nicht unter der MRL gelistet. Des Weiteren steht die Normenreihe ISO10218 kurz vor der Veröffentlichung einer überarbeiteten Version. Teil zwei der Normenreihe wird ab diesem Zeitpunkt die Anforderungen der ISO/TS15066 beinhalten, sodass die Anforderungen an kollaborierender Robotersysteme bald vollständig der ISO10218-2 entnommen werden können und somit auch erstmals unter der MRL harmonisiert sind.
Neben den Normen gibt es weitere hilfreiche Dokumente zum Thema Maschinensicherheit bei kollaborativen Robotern – z.B. die DGUV-Information 209-074 Kollaborierende Robotersysteme samt Checkliste sowie das VDMA-Positionspapier ‚Sicherheit bei der Mensch-Roboter-Kollaboration‘ und mehrere nützliche Whitepapers vom TÜV Austria.
Der Weg zum kollaborierenden Arbeitssystem
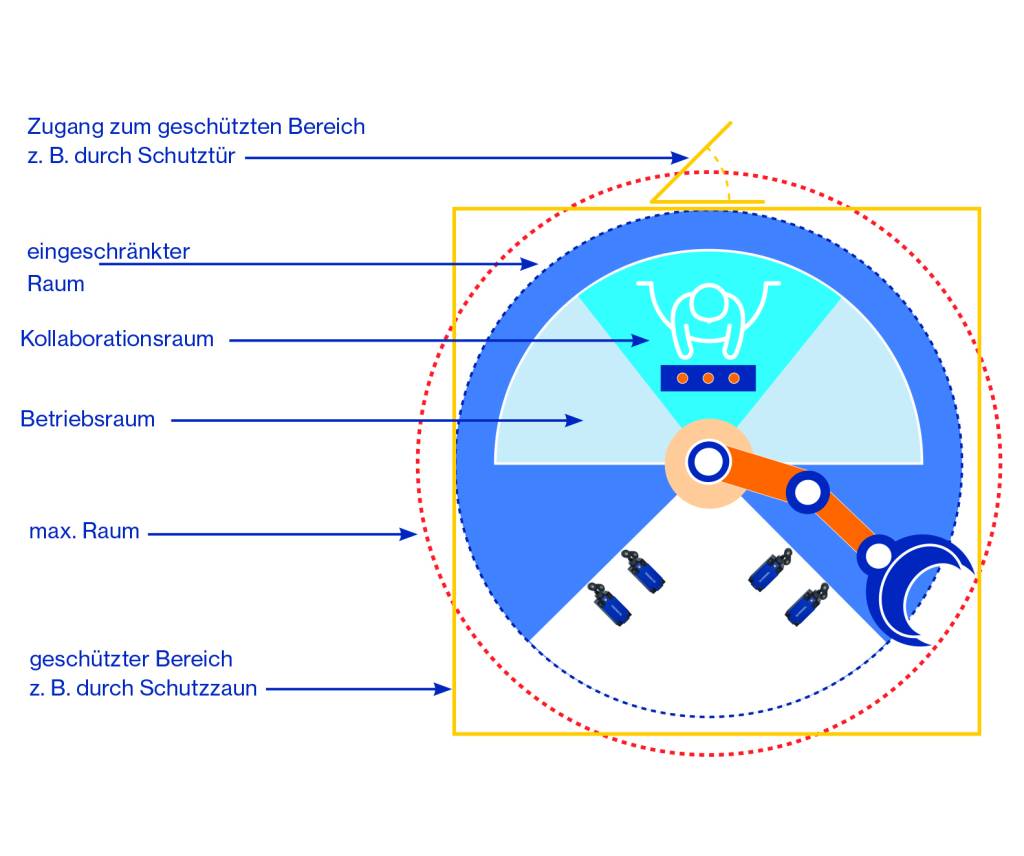
Die ISO10218 definiert die Räume, die bei der Gestaltung der Sicherheitsmaßnahmen von Roboterzellen zu berücksichtigen sind (maximaler Raum, eingeschränkter Raum, Betriebsraum, geschützter Bereich). Darüber hinaus gibt es bei kollaborierenden Robotern einen Kollaborationsraum, der sowohl in ISO10218-1 als auch in ISO/TS15066 beschrieben wird. In ihm können sich Mensch und Roboter gleichzeitig aufhalten und Aufgaben ausführen. Die entsprechende Betriebsart nennt sich kollaborierender Betrieb.
Damit ergibt sich auch bei der Gestaltung der Schutzeinrichtungen von kollaborierenden Robotern bzw. auf dem (sicheren) Weg zum Cobot eine Dreierpyramide:
- Konstruktion/Auswahl des Roboters nach ISO10218-1 (Roboterhersteller)
- Gestaltung der Roboterzelle nach ISO10218-2 und ggf. auch ISO11161 (Integrator)
- Berücksichtigung der ISO/TS15066 für den kollaborierenden Betrieb (Integrator).
Konkrete Anforderungen
Welche Anforderungen gelten nun konkret für Entwurf und Planung einer Roboterzelle als kollaborierendes Arbeitssystem gemäß ISO/TS15066? Wenn das Layout der Zelle definiert ist, sollte der Konstrukteur die Gefährdungen ermitteln und eine Risikobeurteilung durchführen. Daraus ergeben sich die notwendigen Maßnahmen zur Risikominderung. Welche Maßnahmen für ein kollaborierendes Arbeitssystem zulässig sind, wird in der ISO/TS15066 beschrieben und mit den entsprechenden Anforderungen definiert.