
Gestaltung des Layouts der Roboterzelle
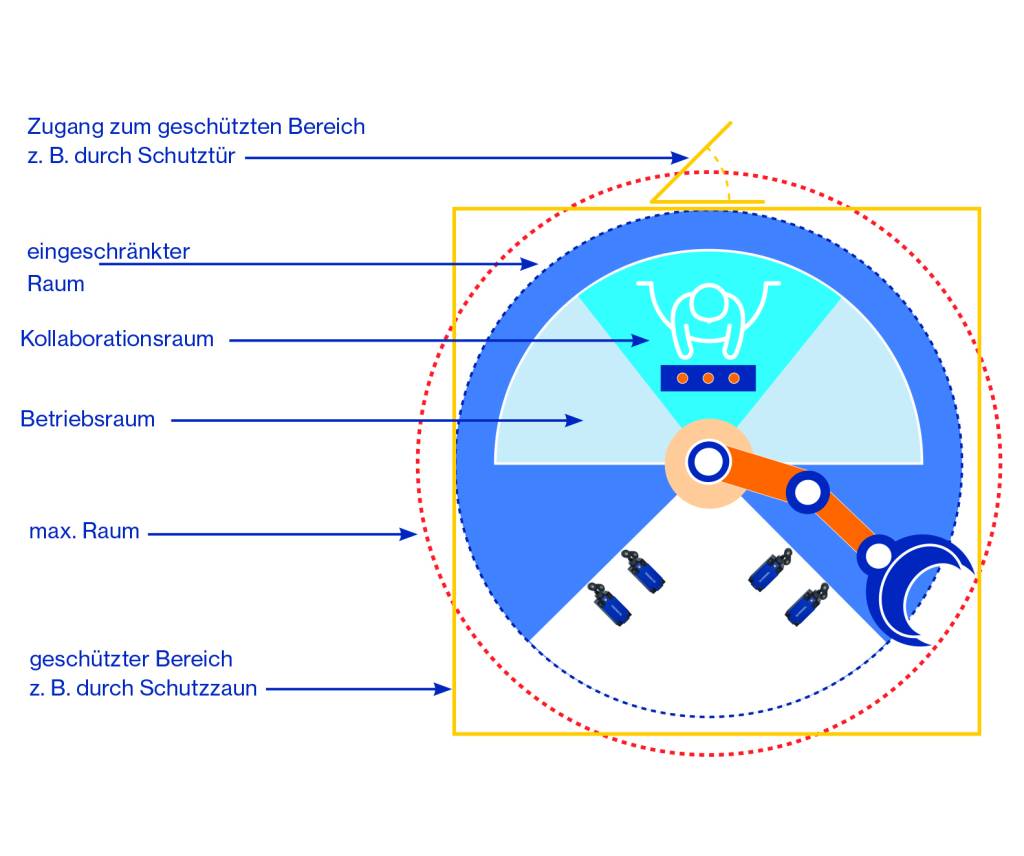
Die Gestaltung des Layouts ist ein Kernprozess bei der Risikominderung in kollaborativen Roboterzellen. Mit dem Layout werden die oben genannten Räume, einschließlich des Kollaborationsraums, festgelegt und auch die Zugänge zu den Gefahrenbereichen. Bei diesem entscheidenden Schritt sollte sowohl die Ergonomie an der Mensch/Maschine-Schnittstelle bedacht werden als auch der zusätzliche Raum, der ggf. für Nachlaufbewegungen des Roboters (z.B. nach der Betätigung der Not/Halt-Einrichtung) benötigt wird.
Besondere Gefährdungen
Zu den Aufgaben des Konstrukteurs bzw. Sicherheitsingenieurs gehört auch die Berücksichtigung des besonderen Gefährdungspotenzials durch Roboter und deren Betrachtung im Rahmen der Risikobeurteilung. Schließlich war es nicht ohne Grund so, dass die Arbeitsbereiche von Mensch und Roboter jahrzehntelang strikt getrennt werden mussten. Hilfreich sind in diesem Zusammenhang die Gefährdungslisten im Anhang A der ISO10218-1 und ISO10218-2, die speziell auf die Gefährdungen von Robotern und in Roboterzellen eingehen.
Konkret besteht das Gefährdungspotenzial u.a. darin, dass Roboter Bewegungen mit hoher Energie und Reichweite ausführen und dass ihr Verfahrweg nur schwer vorhersehbar ist. Unter Umständen muss auch damit gerechnet werden, dass mehrere Roboter in einem gemeinsamen Betriebsraum arbeiten. Deshalb muss der Kollaborationsraum eindeutig festgelegt werden und jede Bedienperson in diesem Raum, d.h. im Arbeitsbereich des Roboters, muss ein eigenes Steuerungselement mit sich führen. Ebenfalls vorgeschrieben ist der Einsatz einer sicheren Software zur Achs- und Raumbegrenzung, die in der Regel vom Hersteller des Roboters bereitgestellt wird.
Möglichkeiten zur Gestaltung des kollaborierenden Betriebes
Die ISO/TS stellt vier Möglichkeiten in den Mittelpunkt, wie die Kollaboration zwischen dem Bediener und dem Roboter realisiert werden kann. Zu diesen gehören die Handführung des Roboters (Bewegung des Roboterarms durch menschliche Krafteinwirkung), die Geschwindigkeits- und Abstandsüberwachung (Verringerung Geschwindigkeit durch Abstand), der sicherheitsbewertete überwachte Halt (Stoppkategorie 2, Wiederanlauf beim Verlassen vom Kollaborationsraum) und die Leistungs- und Kraftbegrenzung (Risikominderung durch reduzierte Kräfte). Fast alle diese Methoden bedingen eine steuerungstechnische Realisierung, sodass zusätzliche Sicherheitsfunktionen zu bewerten sind.