
Der unkontrollierte Zugriff auf Bearbeitungsräume und Roboterzellen muss bei automatischen Fertigungs- und Verpackungsprozessen sicher verhindert werden. Während des Be- und Entladens sollen Roboter und Bedienpersonal hingegen im Wechsel zugreifen können. Mit den flexiblen Gliederschürzen von Hema lassen sich geschützte Bereiche realisieren, die dem Personal einen gesicherten Zugriff im laufenden Prozess ermöglichen.
Ausgabe: ROBOTIK UND PRODUKTION 4 (August) 2021
Omnidirektionaler Sensor

Jabil Optics hat einen omnidirektionalen Sensor für Roboter- und Industrieplattformen entwickelt.
Smarte 3D-Kamera
Matrix Vision und Roboception sind eine langfristige Partnerschaft eingegangen, um auf Basis ihrer Bildverarbeitungs- und 3D-Kompetenz nutzerfreundliche Produkte für den 3D-Bildverarbeitungsmarkt und im Besonderen für Roboternutzer anzubieten.
Automatisiertes Palettieren und Depalettieren mit KI
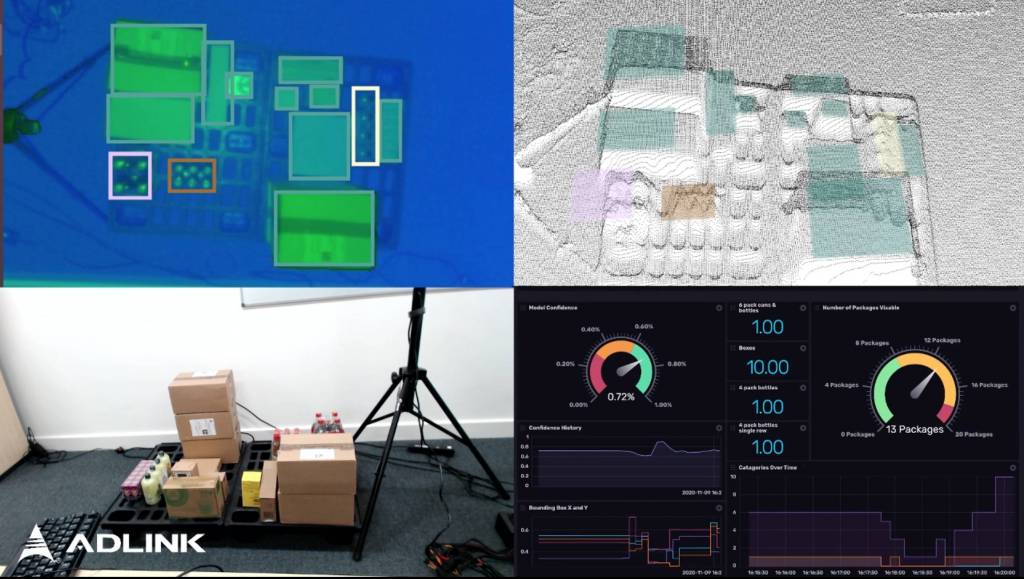
Mit KI-basierter Bildverarbeitung können Palettierungsaufgaben während des laufenden Betriebs automatisiert werden.
Räumliche Orientierung für 3D Robot Vision
Mit der neuen ‚Target Mark 3D‘-Funktion des Vision-Sensors Visor Robotic von Sensopart wird die räumliche Orientierung von Handling- und Montagerobotern vereinfacht – mit wenigen Mausklicks und geringem Programmieraufwand in der Robotersteuerung.
Der Allrounder

Der neue MX-Sauggreifer von Piab greift eine Vielzahl an Gegenständen, egal aus welchem Material, mit welcher Geometrie oder Oberflächenstruktur. Damit eignet sich der Greifer insbesondere für das Bin Picking in Kommissionierlösungen, die Robominds für eCommerce-Kunden und Hersteller komplexer Produkte realisiert.
Fühlen durch Sehen

Kameras sind die essenziellen Sensoren für intelligente Serviceroboter, da sie zur Umgebungserkennung und adaptiven Planung unverzichtbar sind. Jedoch sind solche Roboter durch eine Vielzahl an weiteren Sensoren, wie Positionssensoren, taktilen Sensoren oder Kraft/Momentensensoren, heute sehr komplex. Denn für all diese Sensoren müssen Module aus Sensor, Mess- und Kommunikationselektronik sowie der entsprechenden Steuersoftware räumlich getrennt voneinander installiert werden. Ein Großteil der Sensorik lässt sich aber durch virtuelle, kamerabasierte Sensoren ersetzen, um bis auf die Kamera sensorlose Roboter zu realisieren.
O-förmige Produktionszelle

Die O-Zelle von NeoLog ist entgegen der üblichen U-Form von Produktionszellen in O-Form realisiert.
Robotergestütztes Schraubsystem

@Grundschrift_NH_K01:Das robotergestützte Schraubsystem RSF25 von Weber ist ausgestattet mit einer Spindel, einer automatischen Zuführung und einer Steuerung.
Schleifmaschine mit Robotersystem

Mithilfe der Schleifmaschine CHD 270 samt integriertem Robotersystem ND 250 von Vollmer konnte der kanadische Werkzeughersteller Aiguisatek die Fertigung seiner hartmetallbestückten Kreissägen mannlos und rund um die Uhr aufrechterhalten.