

Wie können wir in naher Zukunft Roboter vollständig in unser tägliches Leben integrieren? Dieser Herausforderung widmet sich derzeit das französische Unternehmen Enchanted Tools. Gegründet von Jérôme Monceaux, der bereits an der Entwicklung der Roboter Pepper und Nao beteiligt war, stellte das Startup kürzlich Miroki vor, den Prototyp einer neuen, wirklich nützlichen Generation humanoider Roboter. Für seine Bewegungen kommen bürstenlose Motoren und Planetengetriebe von Maxon zum Einsatz
Kategorie: Anwendungen & Lösungen
Weniger Kosten durch Zeitersparnis
Wenn es um die Produktion von Radialwellen-Dichtungsringen geht, ist eine intelligente Greiflösung unerlässlich, denn der Greifer muss Dichtungsringe mit verschiedenen Maßen flexibel handhaben. Der Hersteller Kaco setzt hierbei auf einen IO-Link-Greifer von Zimmer, der letztendlich die Produktion effizienter und schneller macht.
Automatisierung von biegeschlaffen Werkstücken
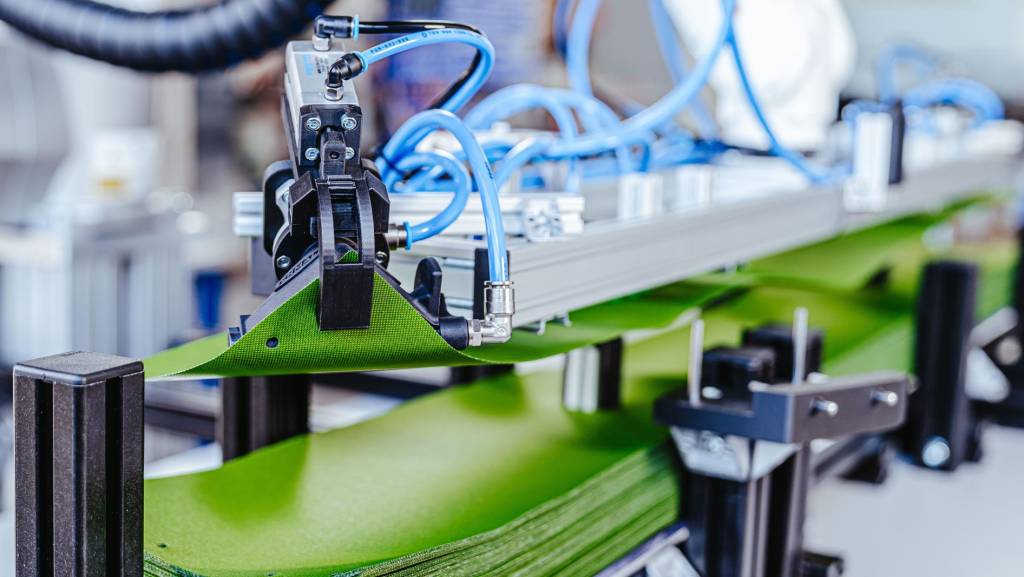
Bei der Handhabung biegeschlaffer Werkstücke treten am Produkt Verformungen auf, die die Automatisierung seit Jahrzehnten vor ein Problem stellen. Eine weitere Herausforderung, die das prozesssichere Greifen von Stoffen bisher nahezu unmöglich macht, ist das Vereinzeln von Stofflagen voneinander. So findet die Maschinenbestückung und -entnahme in der Textilindustrie meist manuell durch eine Person statt. Diese nicht wertschöpfenden Tätigkeiten und Blindprozesse können nun durch die Greiferlösungen von Robotextile automatisiert werden.
Wie gelingt die Roboterintegration?
Um Unternehmen gegen kurzfristige Veränderungen und Anforderungen abzusichern und ihre Wettbewerbsfähigkeit zu erhalten, sind neue, flexiblere Automatisierungslösungen mit Robotern gefragt. Damit roboterbasierte Lösungen aber zu Kosteneinsparung und Effizienzsteigerung führen, kommt es weniger nur auf die richtige Technik und Hardware als vielmehr auf strukturierte Vorüberlegungen und das Erarbeiten zeitgemäßer Automatisierungskonzepte an.
Belohnung als Anreiz zum Lernen
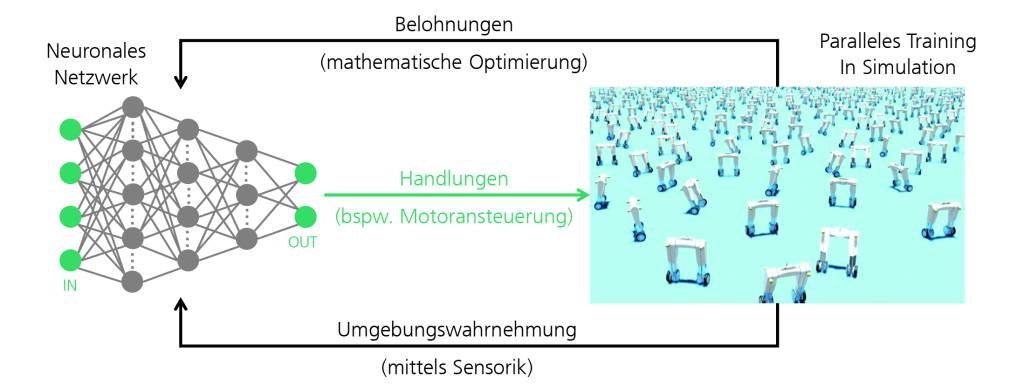
KI-Entwickler Julian Eßer trainiert Roboter, sich intelligent zu verhalten. Denn das Entscheidende ist, dass die Maschinen nicht nur bei kalkulierbaren Ereignissen richtig handeln. Vor allem müssen sie auch in unvorhergesehen Situationen das Richtige tun. Dafür testet er als Mitglied des AI Grids, einer Initiative des Bundesforschungsministeriums, die vielversprechende Talente in künstlicher Intelligenz in Deutschland fördert, am Fraunhofer IML Hunderte Roboter in virtuellen Welten. Ziel ist, dass die Maschinen üben und lernen, mit Störungen und Varianten ähnlicher Situationen umzugehen – und dann selbst Varianten anbieten. Dafür kommt eine Art Belohnungssystem für Roboter zum Einsatz: So lernen sie leichter aus Fehlern und wählen den schnellsten und effektivsten Weg zum Ziel.
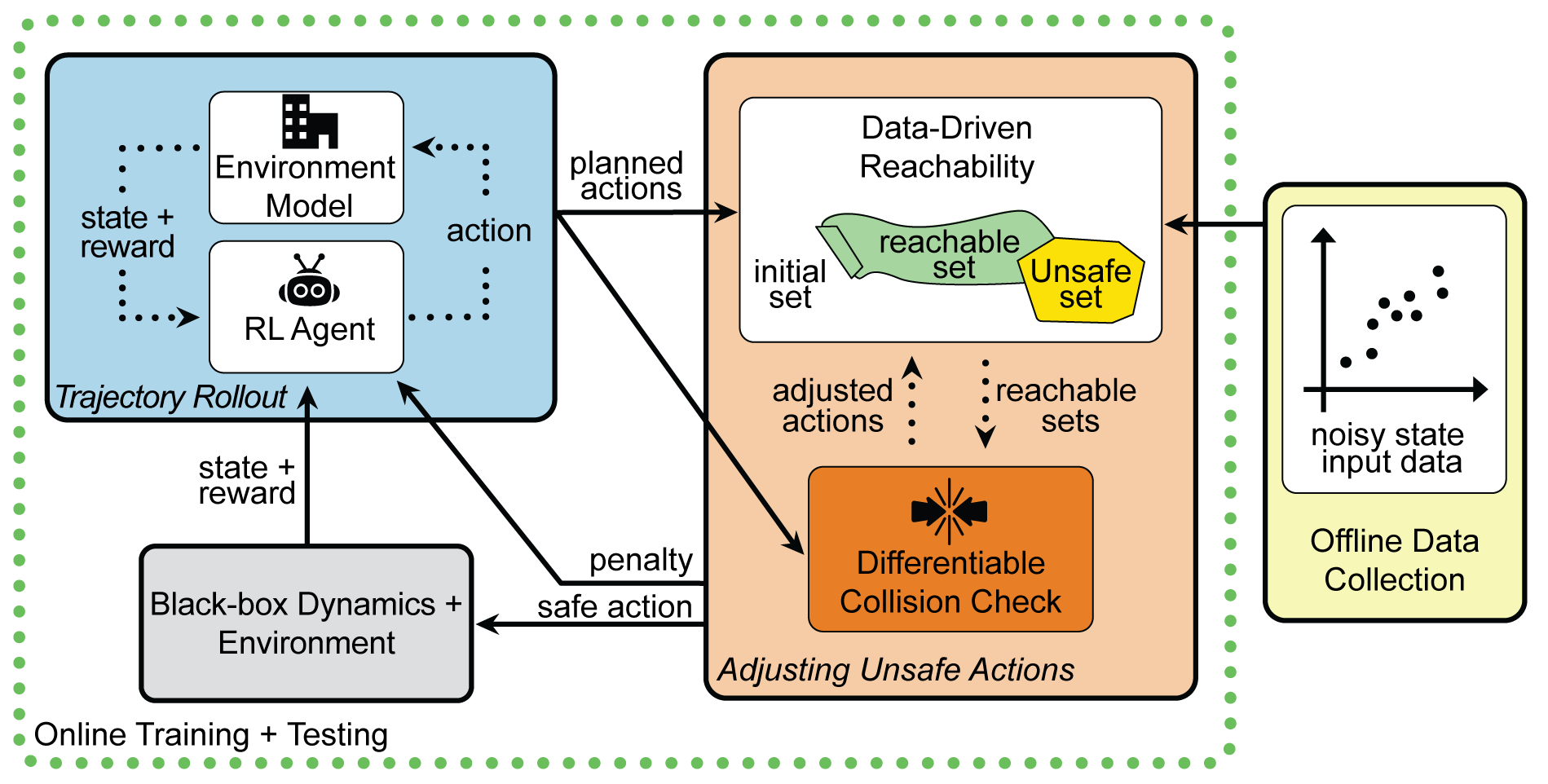
Kollisionsfrei unterwegs
Mit Hilfe von Reinforcement-Learning-Algorithmen können Roboter auch anspruchsvolle Bewegungen in einer unbekannten Umgebung und bei unbekannten Robotermodellen erlernen – doch wie kann man sicherstellen, dass sie Sicherheitsbeschränkungen respektieren, ohne dass sich ihre Performance verschlechtert?
Kollisionsfrei unterwegs
Mit Hilfe von Reinforcement-Learning-Algorithmen können Roboter auch anspruchsvolle Bewegungen in einer unbekannten Umgebung und bei unbekannten Robotermodellen erlernen – doch wie kann man sicherstellen, dass sie Sicherheitsbeschränkungen respektieren, ohne dass sich ihre Performance verschlechtert?
Scara-Roboter handhaben Parfümflakons

Mit der GlassFeeder-Serie hat der spanische Automatisierer Teknics ein Zuführsystem mit hoher Flexibilität entwickelt.
Schweißanlagen für individuelle Filterlösungen

Kawasaki Robotics hat eine Kompaktschweißanlage vorgestellt, die einsatzbereit im Überseecontainer ausgeliefert wird.
Flexible Prüfstation mit Cobot

Das Fraunhofer IEM hat gemeinsam mit dem Geldautomatenhersteller Diebold Nixdorf und dem Softwarespezialisten Verlinked im it’s OWL-Projekt CogeP eine Kombination aus kollaborativem Roboter, KI-basierter Bildauswertung und IoT-Plattform entwickelt.