
Mit dem Greifer stellt ein Roboter die Verbindung zum Werkstück her.
DPM Cluster: Robotik
Weniger Kosten durch Zeitersparnis
Wenn es um die Produktion von Radialwellen-Dichtungsringen geht, ist eine intelligente Greiflösung unerlässlich, denn der Greifer muss Dichtungsringe mit verschiedenen Maßen flexibel handhaben. Der Hersteller Kaco setzt hierbei auf einen IO-Link-Greifer von Zimmer, der letztendlich die Produktion effizienter und schneller macht.
Wie die richtige Spanntechnik die Automatisierung vorantreibt

Weniger Fachkräfte, mehr Schwankungen im Auftragseingang und immer individuellere Kundenanforderungen: Diese Faktoren beeinflussen die Fertigungsplanung zunehmend. Gerade bei kleinen Fertigungschargen mit Losgrößen unter 100 macht in diesem Spannungsfeld die Automatisierung den Unterschied. Ein entscheidender Ansatzpunkt findet sich hierbei auch im Rüst- und Spannprozess.
Automatisierung von biegeschlaffen Werkstücken
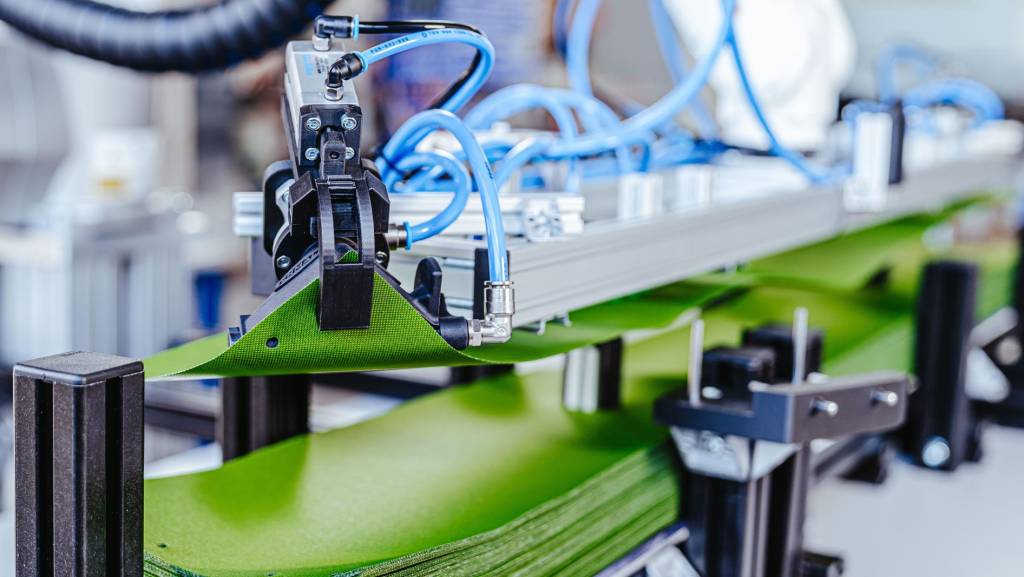
Bei der Handhabung biegeschlaffer Werkstücke treten am Produkt Verformungen auf, die die Automatisierung seit Jahrzehnten vor ein Problem stellen. Eine weitere Herausforderung, die das prozesssichere Greifen von Stoffen bisher nahezu unmöglich macht, ist das Vereinzeln von Stofflagen voneinander. So findet die Maschinenbestückung und -entnahme in der Textilindustrie meist manuell durch eine Person statt. Diese nicht wertschöpfenden Tätigkeiten und Blindprozesse können nun durch die Greiferlösungen von Robotextile automatisiert werden.
Wie gelingt die Roboterintegration?
Um Unternehmen gegen kurzfristige Veränderungen und Anforderungen abzusichern und ihre Wettbewerbsfähigkeit zu erhalten, sind neue, flexiblere Automatisierungslösungen mit Robotern gefragt. Damit roboterbasierte Lösungen aber zu Kosteneinsparung und Effizienzsteigerung führen, kommt es weniger nur auf die richtige Technik und Hardware als vielmehr auf strukturierte Vorüberlegungen und das Erarbeiten zeitgemäßer Automatisierungskonzepte an.
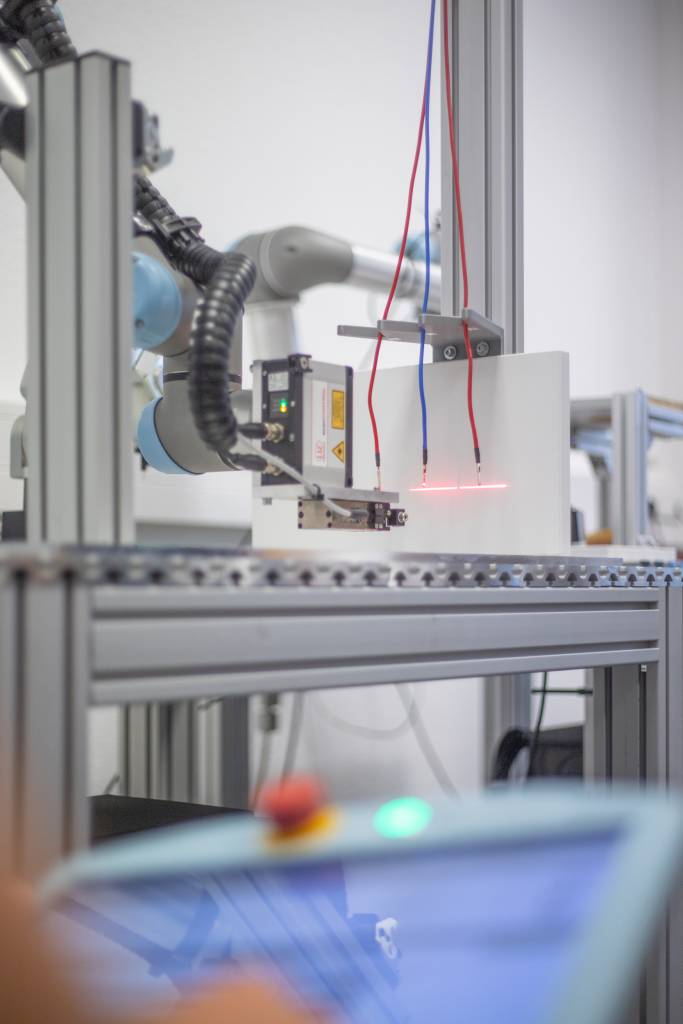
Sichere Robotersteuerung aus der Cloud
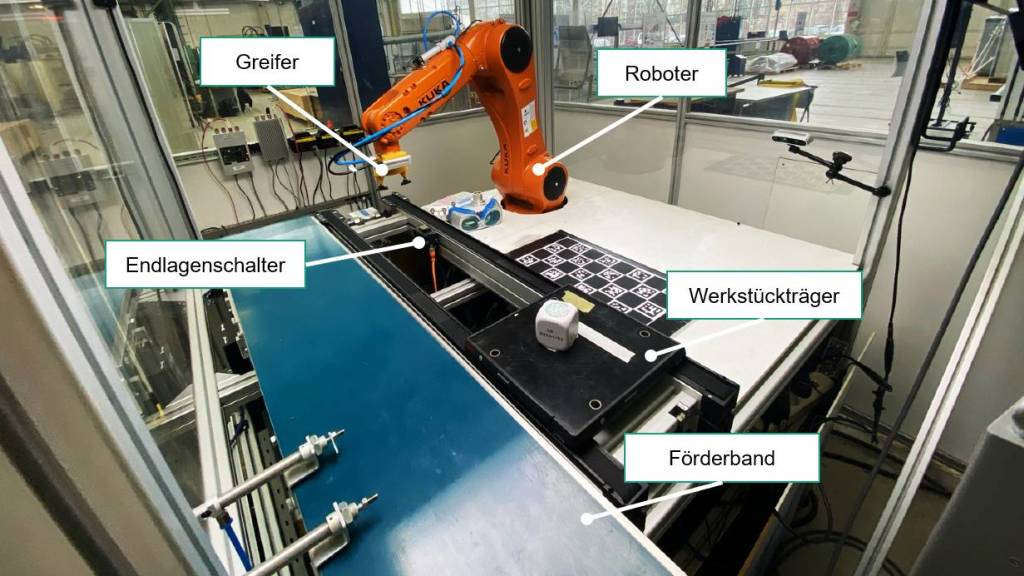
Die Steuerung von Robotersystemen wird bisher lokal mit proprietärer Software realisiert. Ein Grund dafür ist das fehlende Vertrauen in die Datensicherheit von Online-Diensten. Durch Smart Contracts könnte sich das ändern und künftig Robotersteuerungen auslagern lassen. Dazu werden die Algorithmen zur Bewegungsplanung per Blockchain ausgeführt – verschlüsselt übertragen und fälschungssicher dokumentiert. Erste Experimente zeigen die Machbarkeit einer solchen Architektur und zeigen Potenzial für robotergeführte Handhabungsaufgaben.
Belohnung als Anreiz zum Lernen
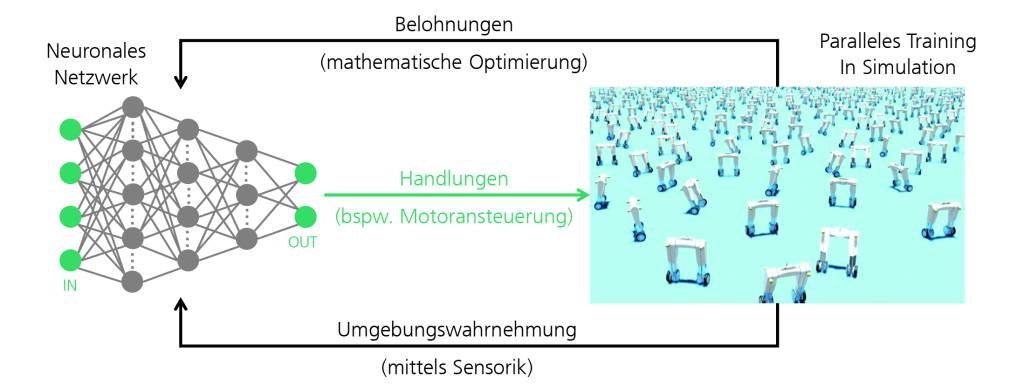
KI-Entwickler Julian Eßer trainiert Roboter, sich intelligent zu verhalten. Denn das Entscheidende ist, dass die Maschinen nicht nur bei kalkulierbaren Ereignissen richtig handeln. Vor allem müssen sie auch in unvorhergesehen Situationen das Richtige tun. Dafür testet er als Mitglied des AI Grids, einer Initiative des Bundesforschungsministeriums, die vielversprechende Talente in künstlicher Intelligenz in Deutschland fördert, am Fraunhofer IML Hunderte Roboter in virtuellen Welten. Ziel ist, dass die Maschinen üben und lernen, mit Störungen und Varianten ähnlicher Situationen umzugehen – und dann selbst Varianten anbieten. Dafür kommt eine Art Belohnungssystem für Roboter zum Einsatz: So lernen sie leichter aus Fehlern und wählen den schnellsten und effektivsten Weg zum Ziel.
Smarte Greiflösung für Cobots ausgebaut
Weiss Robotics hat sein Gripkit-Angebot um eine neue Ausführung erweitert.
Vakuumsaugspinne für das Handling von Türblättern

Für den Tür- und Fensterhersteller Josko hat Schmalz eine Lösung entwickelt, die mithilfe einer Saugspinne 80-mal 80kg in acht Stunden stemmt.
Flächengreifer für Cobots

Fipa hat den neuen Flächengreifer Cobot Smart Gripper CSG vorgestellt, der speziell für den Einsatz mit Cobots konzipiert ist.